As we proceed through the course, we are usually given a first-order differential equation that could be solved. However, there are a lot of problems that cannot be solved. The first order equations could be divided into the linear equation, separable equation, nonlinear equation, exact equation, homogeneous equation, Bernoulli equation, and non-homogeneous equations. However, most of the separable and exact equation cannot always be presented the solution in an explicit form. It’s hard to find the value for a particular point in the function. There are some of the equations that do not fall into any of the categories above. So we introduce the method called Euler’s Method. We will be able to use it to approximate the solutions to a differential equation. In the Euler method, we will be given a differential equation which is the slope of a function, and define a step size for the integral ( the smaller steps sizes you have, the more accurate approximation values you will be get ). We generate a new point by starting at an initial point, we plug in this point into the given function, this will be the slope of the initial point. Then, then next new point will be the 
%3Dy_n%2Bhf(t_n%2Cy_n))
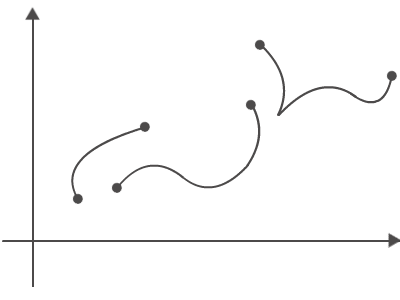
Now, we introduce an improved Euler’s Method. This method is quite similar to the Euler’s method. In the Euler’s Method we approximate the function by a rectangular shape (see graph below):
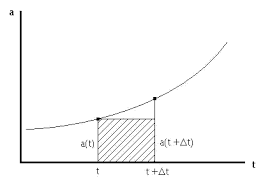 However, this approximate does not include the area that under the curve. To improve the approximation, we use the improved Euler’s method.The improved method, we use the average of the values at the initially given point and the new point. We define the integral with a trapezoid instead of a rectangle. The trapezoid has more area covered than the rectangle area. It will also provide a more accurate approximation.
However, this approximate does not include the area that under the curve. To improve the approximation, we use the improved Euler’s method.The improved method, we use the average of the values at the initially given point and the new point. We define the integral with a trapezoid instead of a rectangle. The trapezoid has more area covered than the rectangle area. It will also provide a more accurate approximation.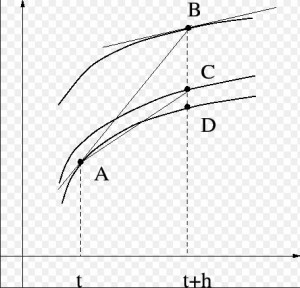
It is hard to predict the solution curve is concave up or concave down in reality. The ideal prediction line would exactly hit the curve at next predict point. The Euler’s Method generates the slope based on the initial point, and we don’t know if the next point will be on this slope line, unless we use a computer to plot the equation. Sometimes, we might overestimate the value or underestimate the value. The Improved Euler’s Method addressed these problems by finding the average of the slope based on the initial point and the slope of the new point, which will give an average point to estimate the value. It also decreases the errors that Euler’s Method would have.
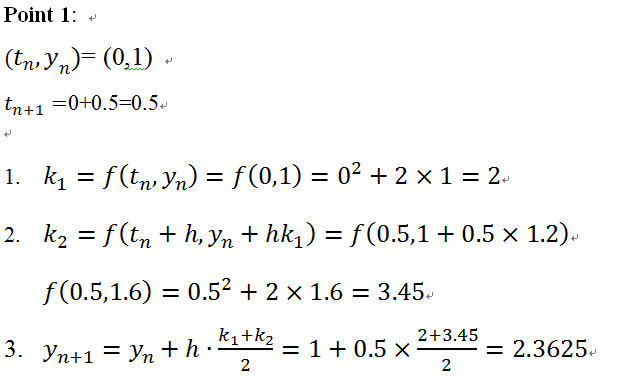
The improved Euler’s Method simply divided into three steps as following:
Steps in Improved Euler’s Method:
Step 1 find the
)
Step 2 find the
)
Step 3: find
%3Df(t_n%2Bh%2Cy_n%2Bh((k_1%2Bk_2)%2F2)))
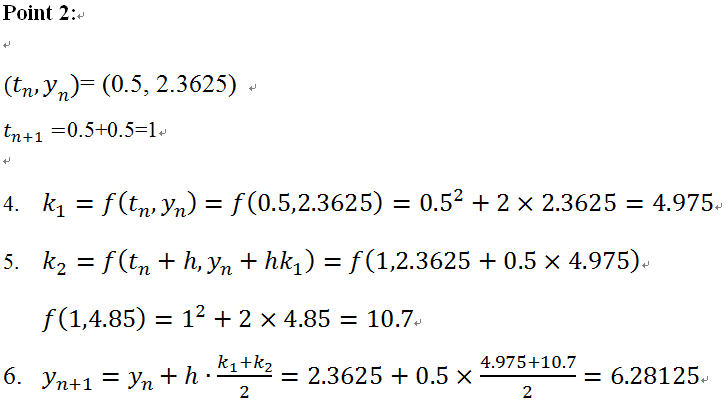
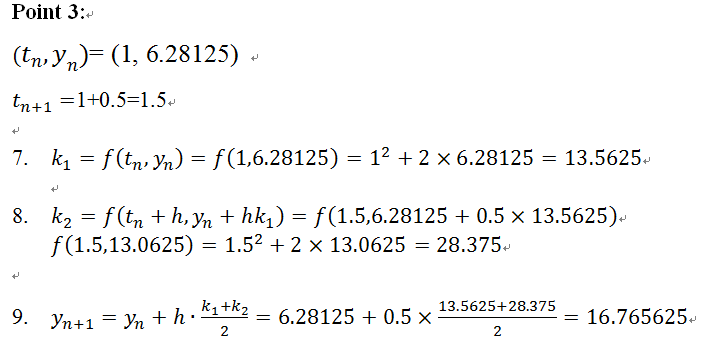
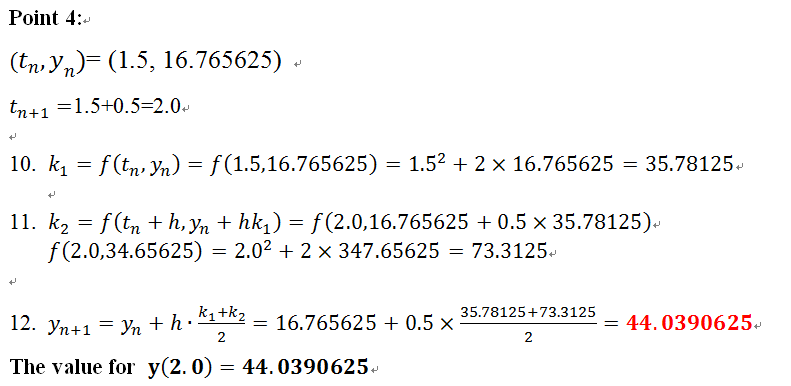
Given a first order linear equation y’=t^2+2y, y(0)=1, estimate y(2), step size is 0.5.
Summary 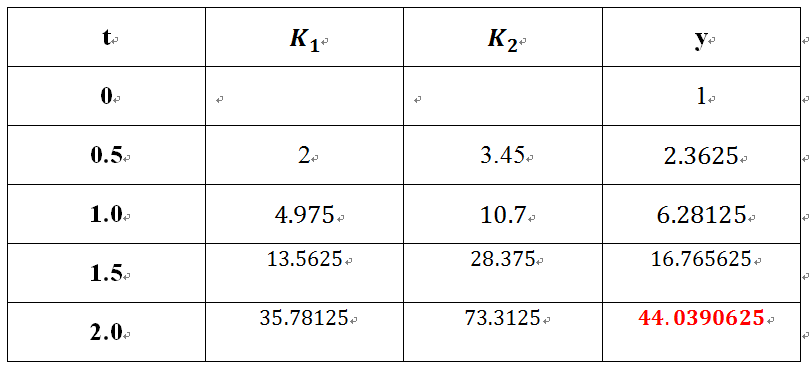
Note: it is very important to write the )
)
I think this video is pretty helpful, and make a clear point on the improved Euler’s Method and a example include in the video. please check out this video.

 \frac{dy}{dx}=0") .
. with respect y and
with respect y and  with respect to x.
with respect to x. .
.") .
.") .
.=2y+x^2+1")
 .
.= \int 2y+1")
=y^2+y") .
. .
.
y^{\prime}+q(t)y=g(t)")

 (quadratic equation)
(quadratic equation)

 and
and  are different roots from the characteristic equation.
are different roots from the characteristic equation.


(r-2)=0")
 ,
, 



(r-3)=0")


 ,
, =-7") ,
, =-30")

(r-2)=0")
 ,
, 

=-7}") ,
, 
}}+Be^{2\textbf{(0)}}")

=-30}")

}}+2Be^{2\textbf{(0)}}")




+2B")




}")


 ,
, =4") ,
, =39")

(r-9)=0")



=4}") ,
, }}+9Bte^{9\textbf{(0)}}")


=39}") ,
, 
}e^{9\textbf{(0)}}+Be^{9\textbf{(0)}}")

}+B")