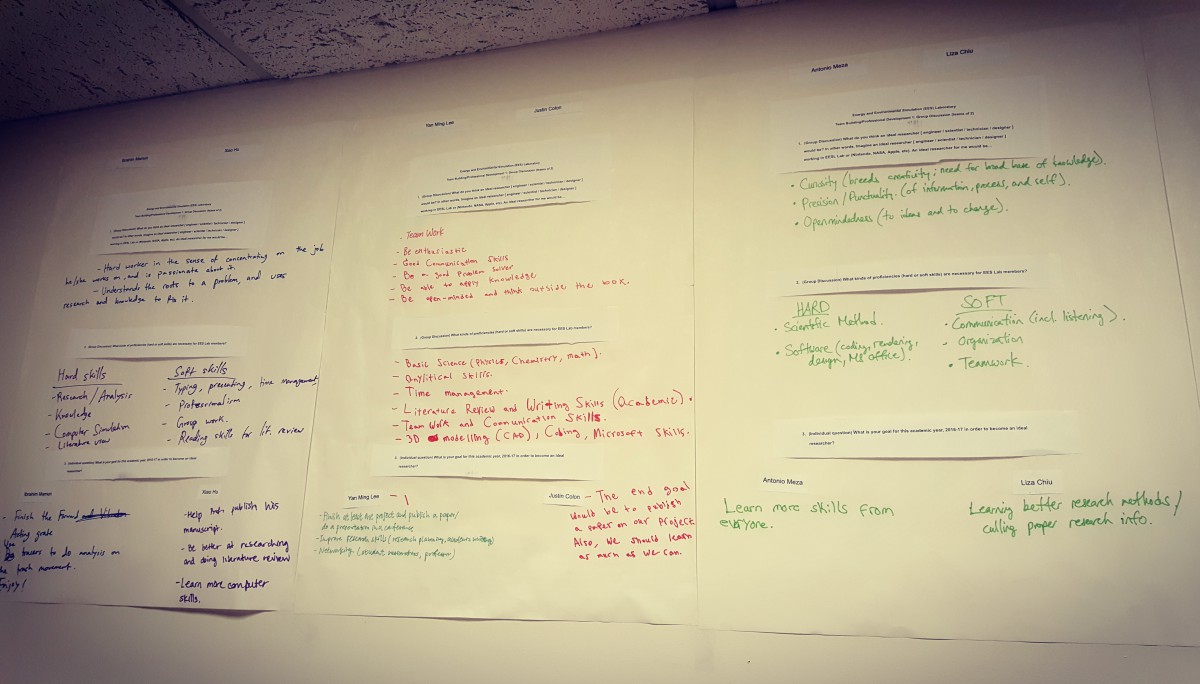
 Here are the results of the discussion. We want to be excellent researchers.
Here are the results of the discussion. We want to be excellent researchers.
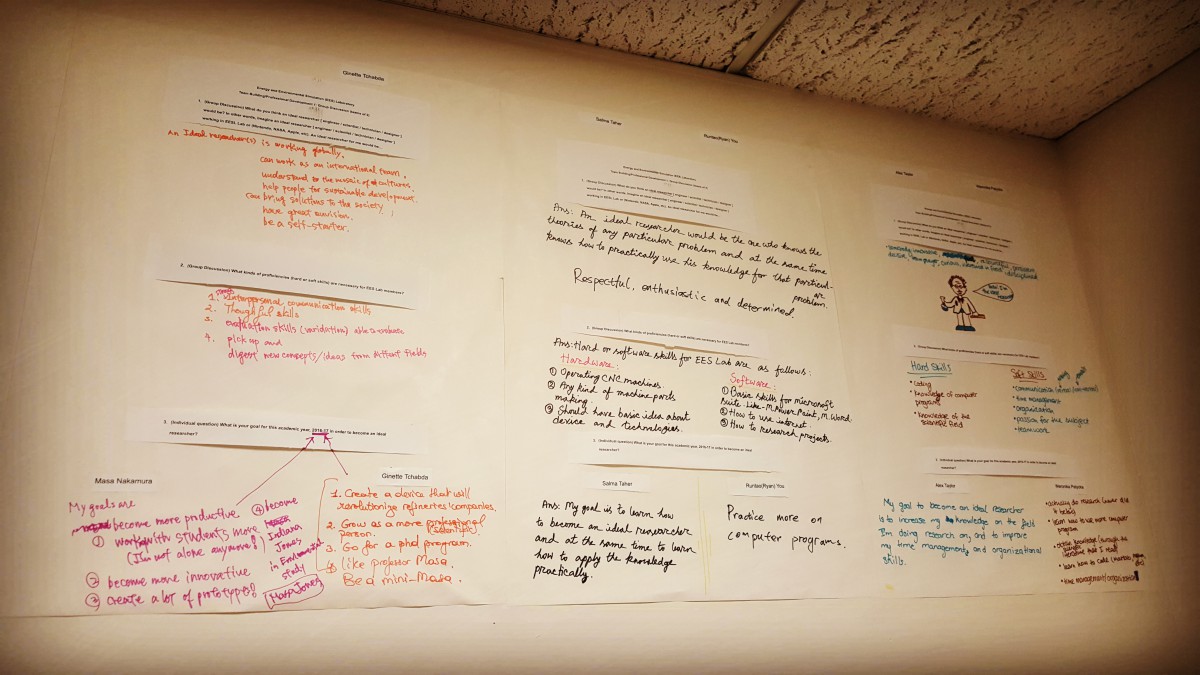 In order to be excellent, individual members put their 20016-17 goals as well.
In order to be excellent, individual members put their 20016-17 goals as well.
Team Building Project 3/3
Leave a reply
We had a Team Building Project as one of the professional development activities.

Group members are divided into 6 groups, each of which has two members.
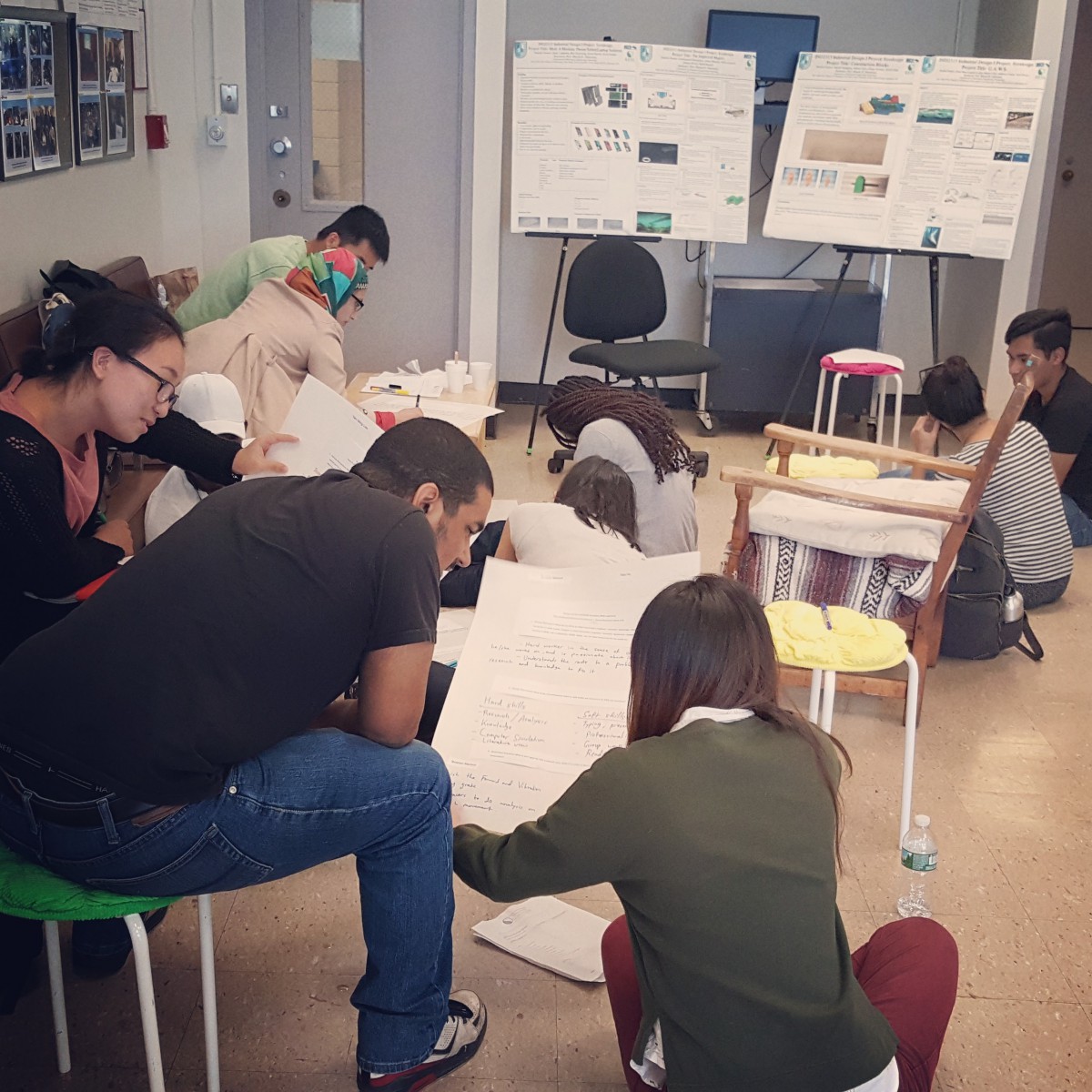 Then, each group had a brainstorming about skills and minds that ideal researchers have.
Then, each group had a brainstorming about skills and minds that ideal researchers have.
and happy birthday, Xiao!

Meeting and a demo of composting system research.

Motion Control Project
Members:
++ Masa Nakamura
Website: https://openlab.citytech.cuny.edu/eesl/2016/10/22/computing-for-motion-control-project/
Project activities:
++ Setup Raspberry PI servers: forward, vibration, compost
++ Aquire Static IP Addresses for PIs
++ Setup wireless network
++ install vlc
++ Install phidget library
++ Programming for motions responding sensor inputs
Current status:
++ Fix wireless issue
++ Fix OpenCV installation errors
++ Check All PIs MAC address (both ethernet and wireless)
++ Ask CIS to register city tech wireless network.
References:
++ Raspberry Pi:
…… VNCserver,
…… raspistill
…… cron
…… mount usb memory
++ OpenCV
…… Install,
…… Tutorial
++ Sensors and motors:
…… Phidgets,
…… Sunfounder Sensor kit,
…… Kuman Tech (K32),
…… Adafruit: Adafruit 16-Channel Servo HAT
++ bcm2835 liburary
++ C/C++ in Rasberry Pi:
…… Geany (IDE),
…… GPIO,
…… Tutorial
++ Troubleshooting:
…… Pi 3 wireless ( sudo iwconfig wlan0 power off )
++ Motors:
…… Standard Servo, Hitec HS-422, product info
…… Continuous Rotation Servo – FeeTech FS5103R
…… Continuous Rotation Servo Hitec HSR-1425CR
…… Continuous Rotation Micro Servo – FS90R
…… High Torque 2BB Metal Gear Servo, Hitec HS-645MG
++ Monitor:
…… HDMI 4 Pi: 7″ Display w/Touchscreen 1024×600- HDMI/VGA/NTSC/PAL, config.txt
++ Distance Sensors:
…… Sharp A41SK datasheet
…… HC-SR04 Ultrasonic Module Distance Sensor datasheet 1, 2
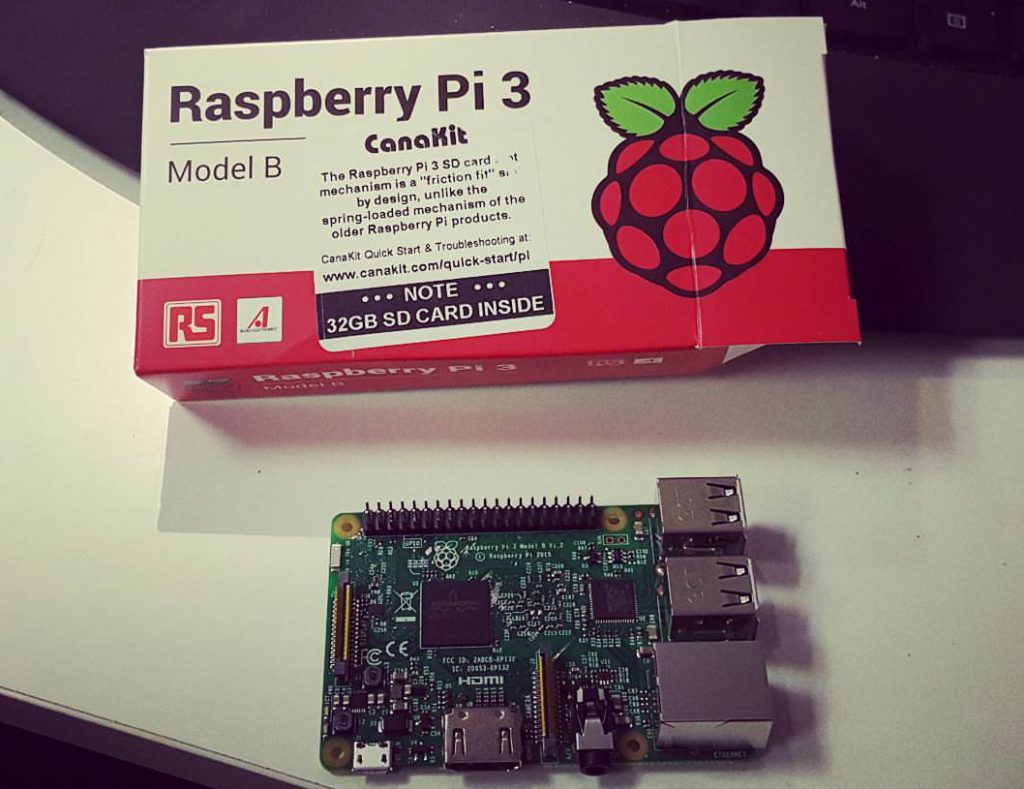 Rasperry Pi 3 is used in this project.
Rasperry Pi 3 is used in this project.

The OpenLab is an open-source, digital platform designed to support teaching and learning at City Tech (New York City College of Technology), and to promote student and faculty engagement in the intellectual and social life of the college community.

 Posters were put on a wall of the lab room.
Posters were put on a wall of the lab room.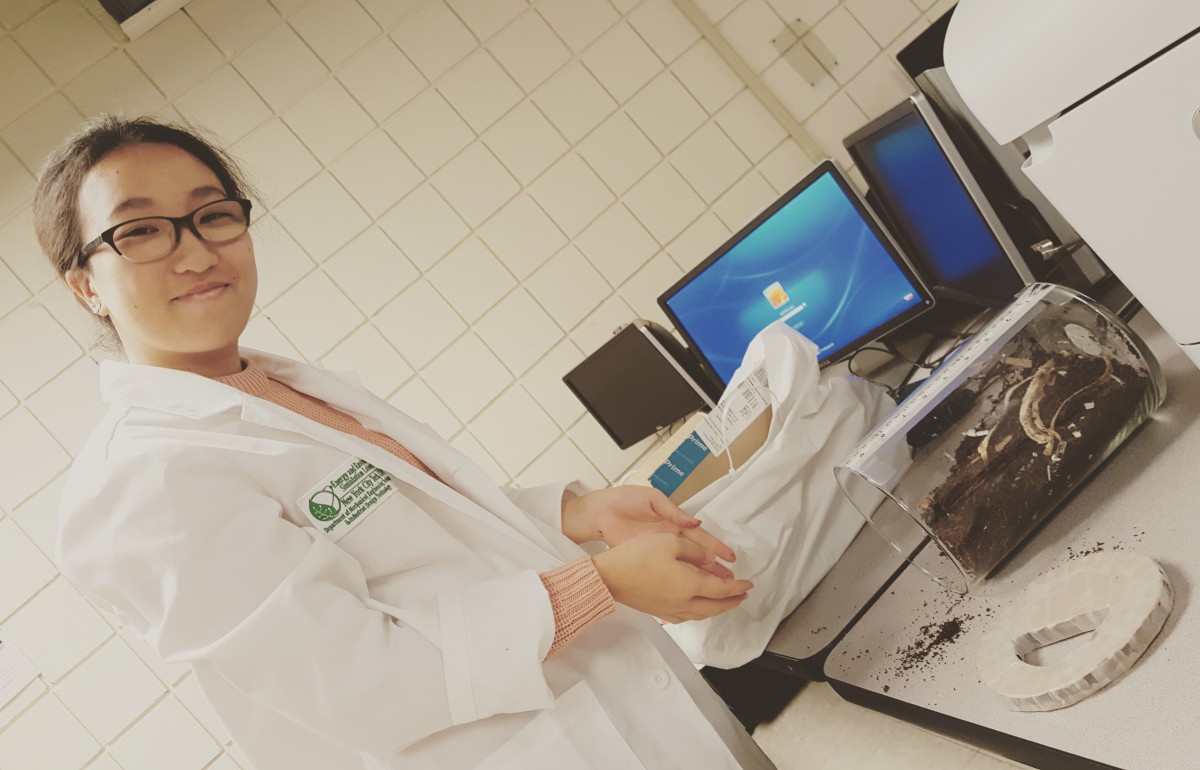
 Earthworms were installed into a glass cylinder.
Earthworms were installed into a glass cylinder. Temperature, moisture, and pH are measured during the composting processes.
Temperature, moisture, and pH are measured during the composting processes.
{kind=link}
{kind=link}