Objective: We shall be testing out our robot. (BoByBot)
Materials: Bread/Arduino board, screw drivers, pliers, chassis, 3 wheels, batteries and an android smart phone.
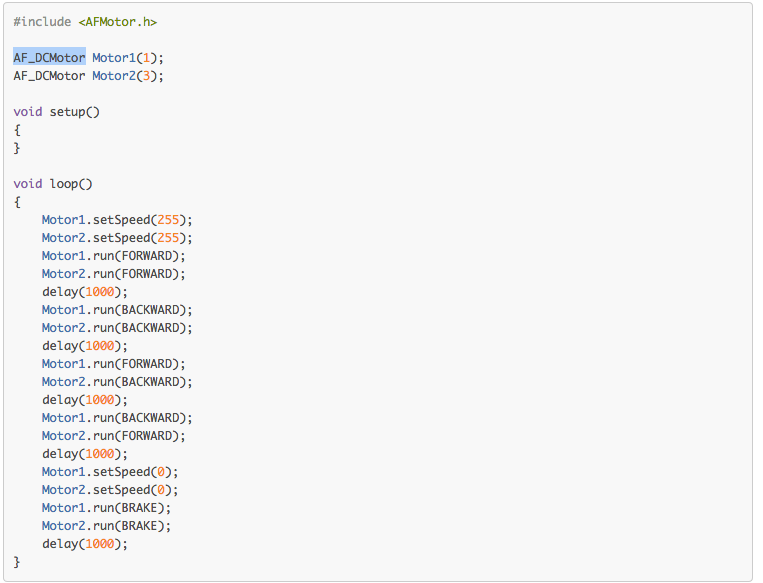
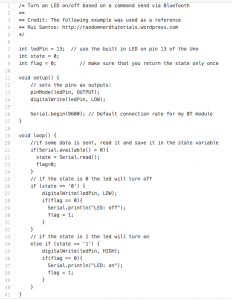
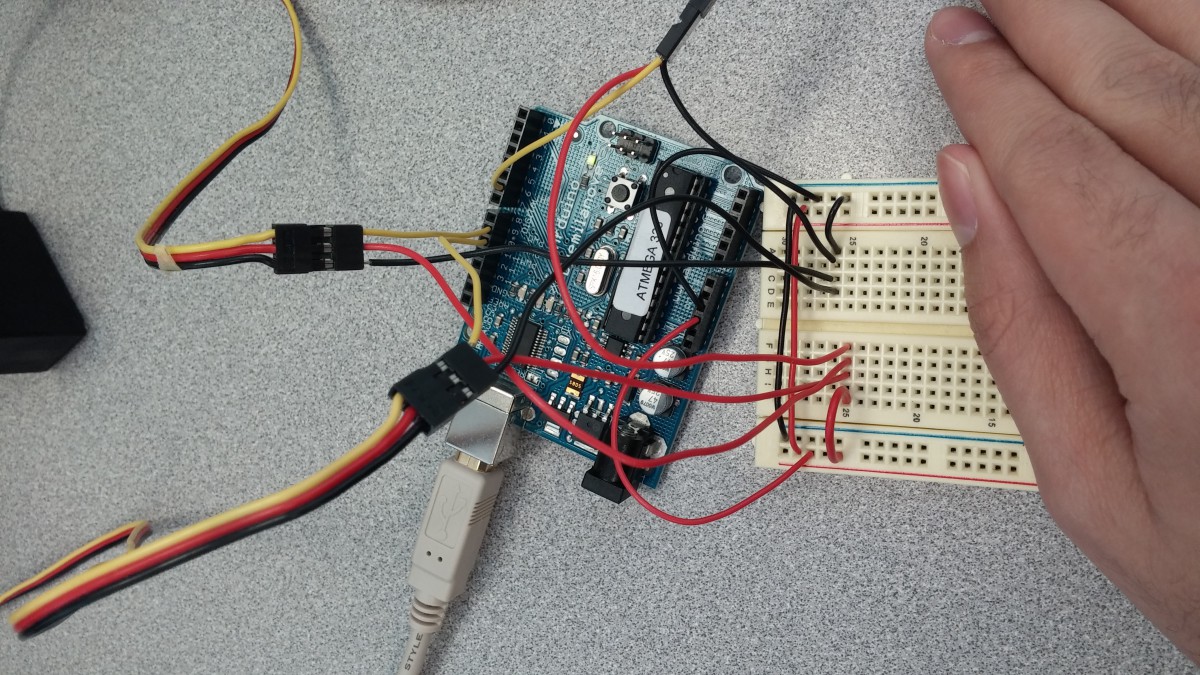
Methods: We connected everything together. (Bread/Ardunio board, wheels to the chassis). All so we could test it our robot. We also tried wsad commands. W being foward, S being reverse, A being left and D being right.
Data:
Results: We had the wheels reversed by mistake and that is why are robot wasn’t working correctly. So, then when we switched them around, and our robot worked fine, for awhile.
Discussion: We will try and work on fixing the controls so it moves correctly.