Mech lab 8 extra cr

Mech lab 8 extra cr
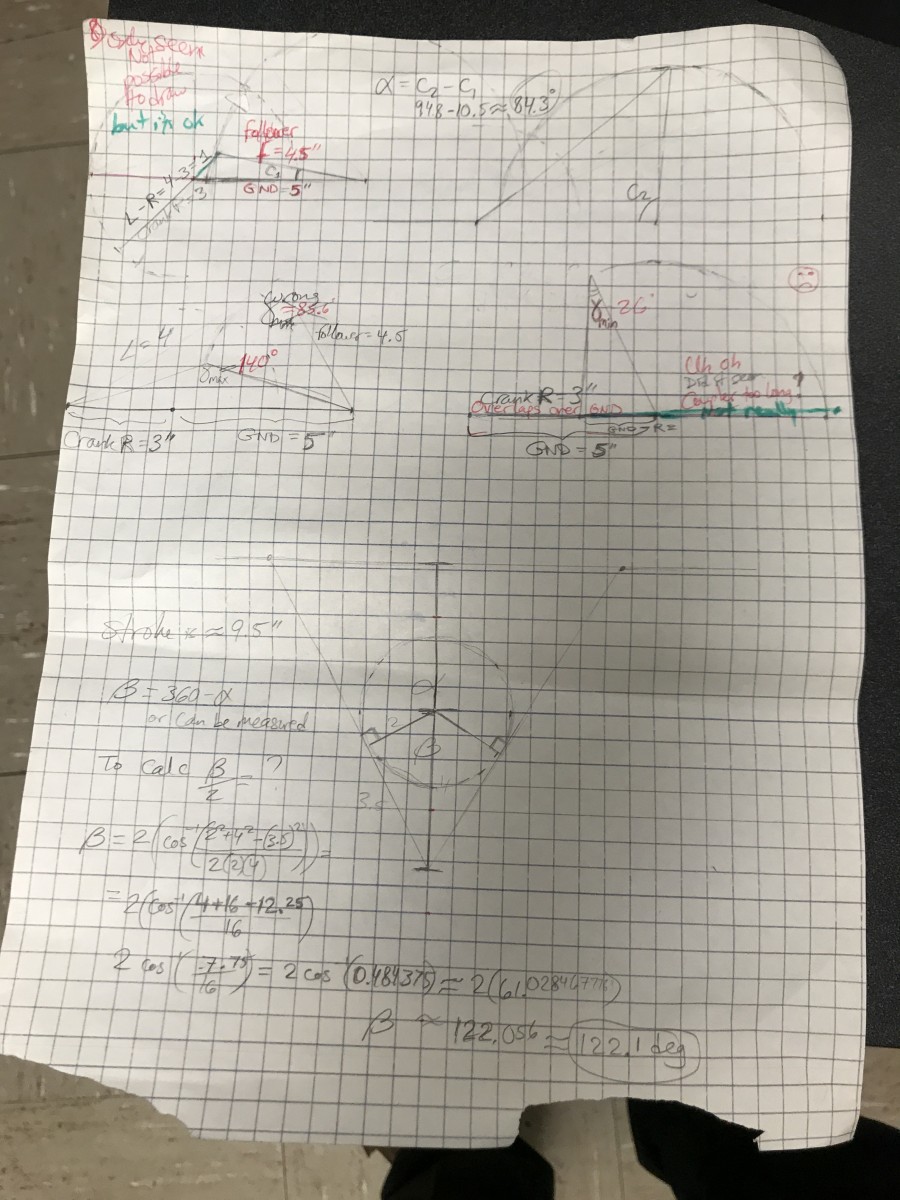
Graphical solution for Q.10
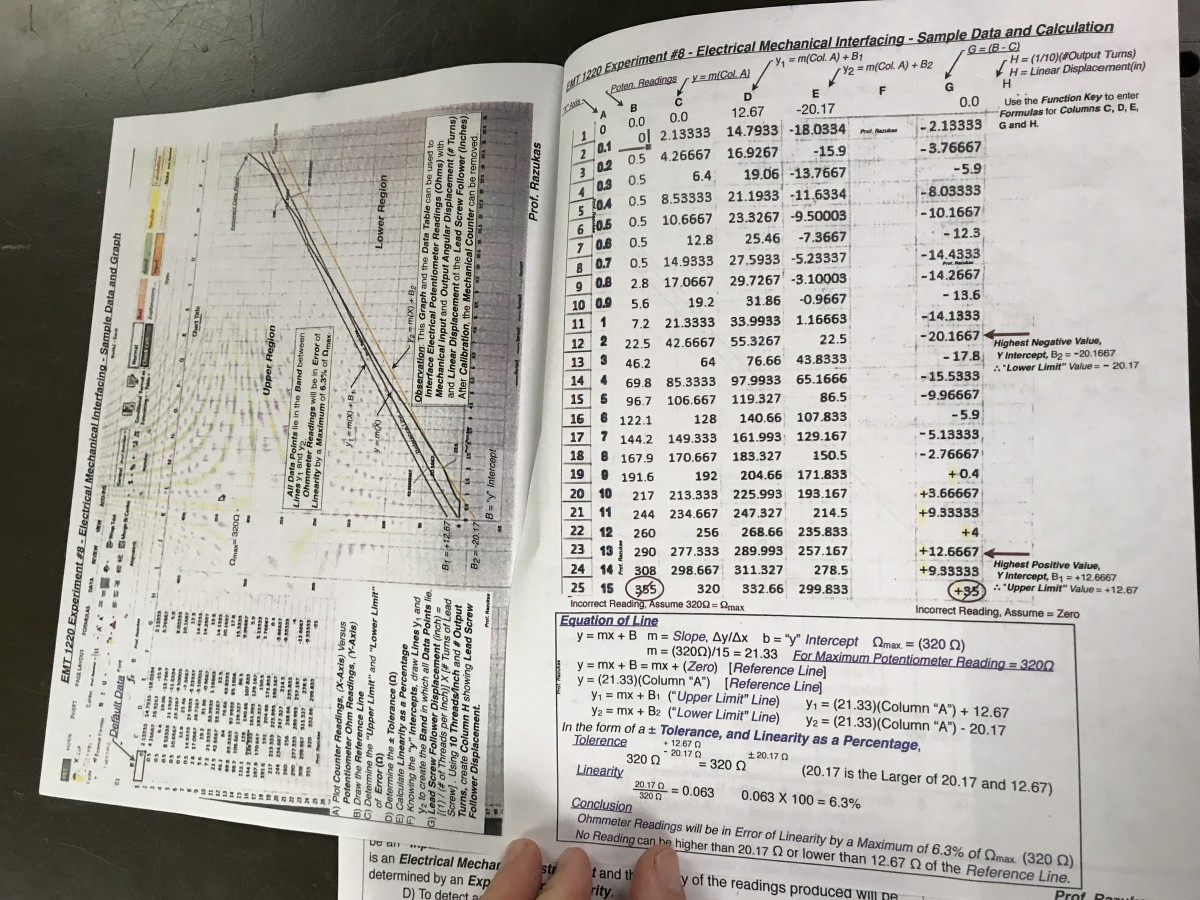
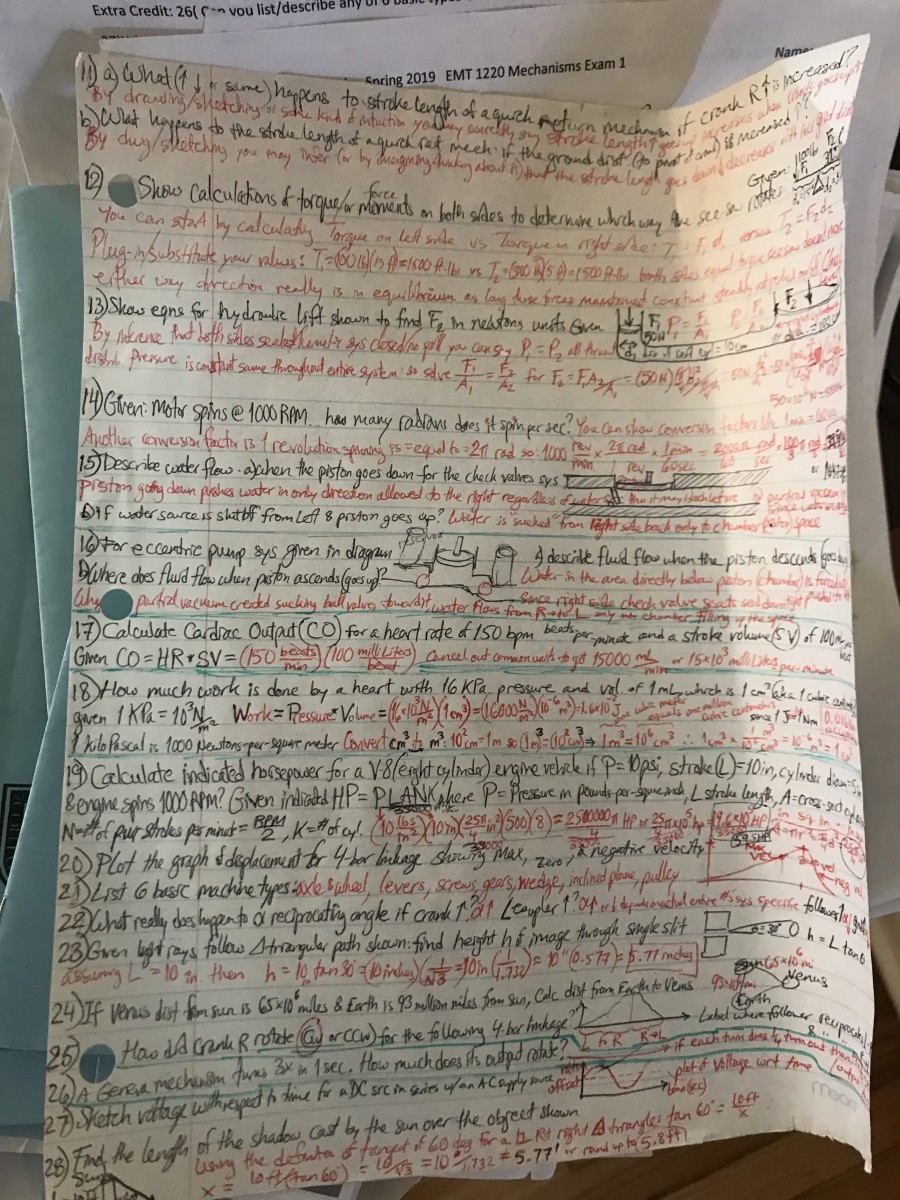
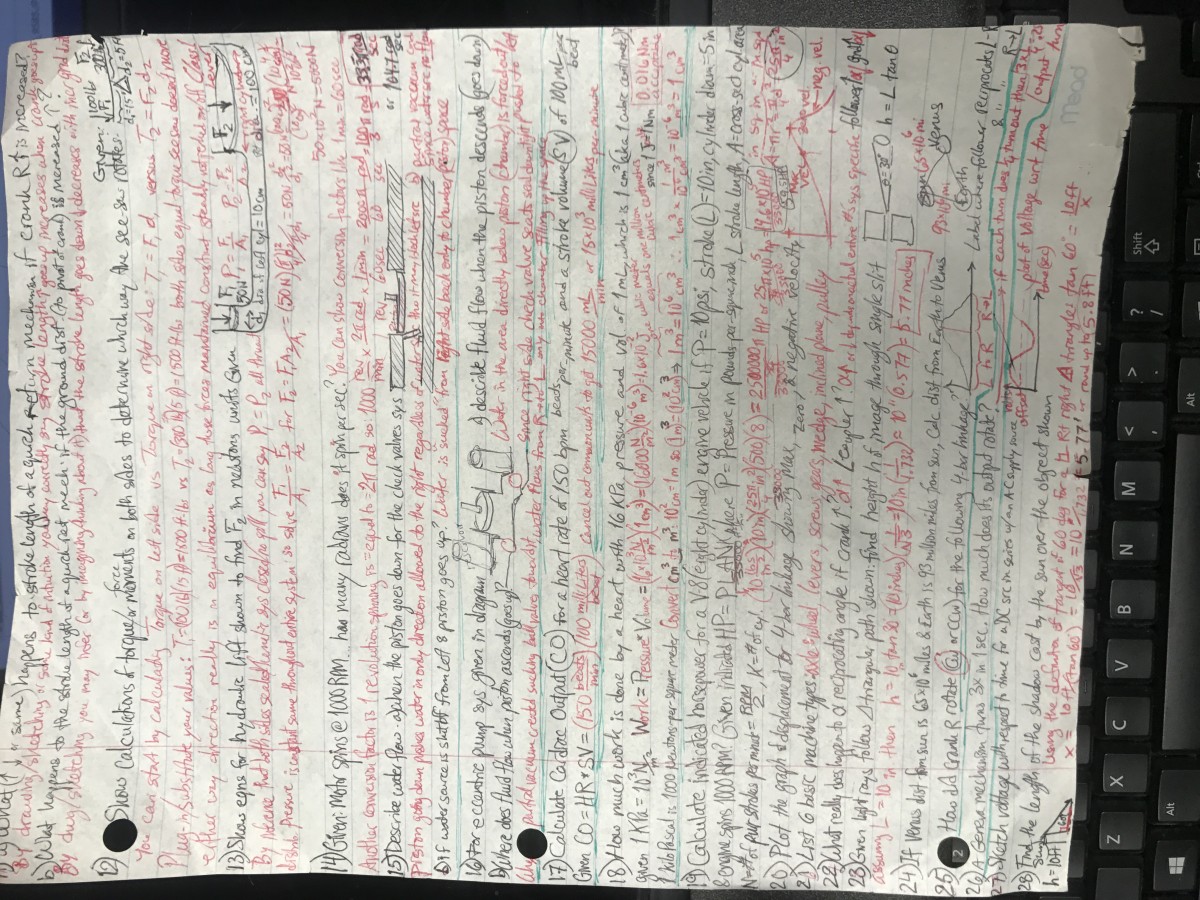
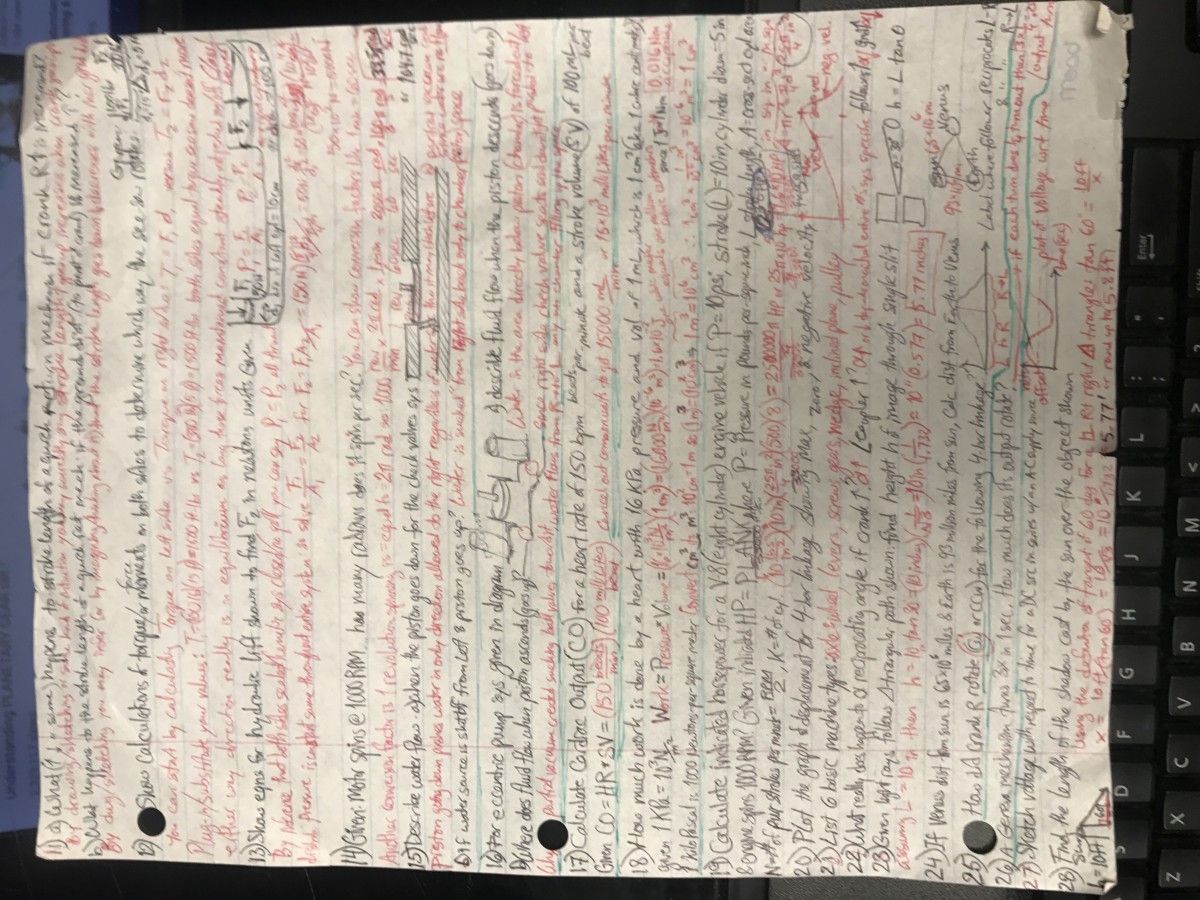
Answer sheet solutions guide for helping you study & be prepared at least halfway through to the final exam..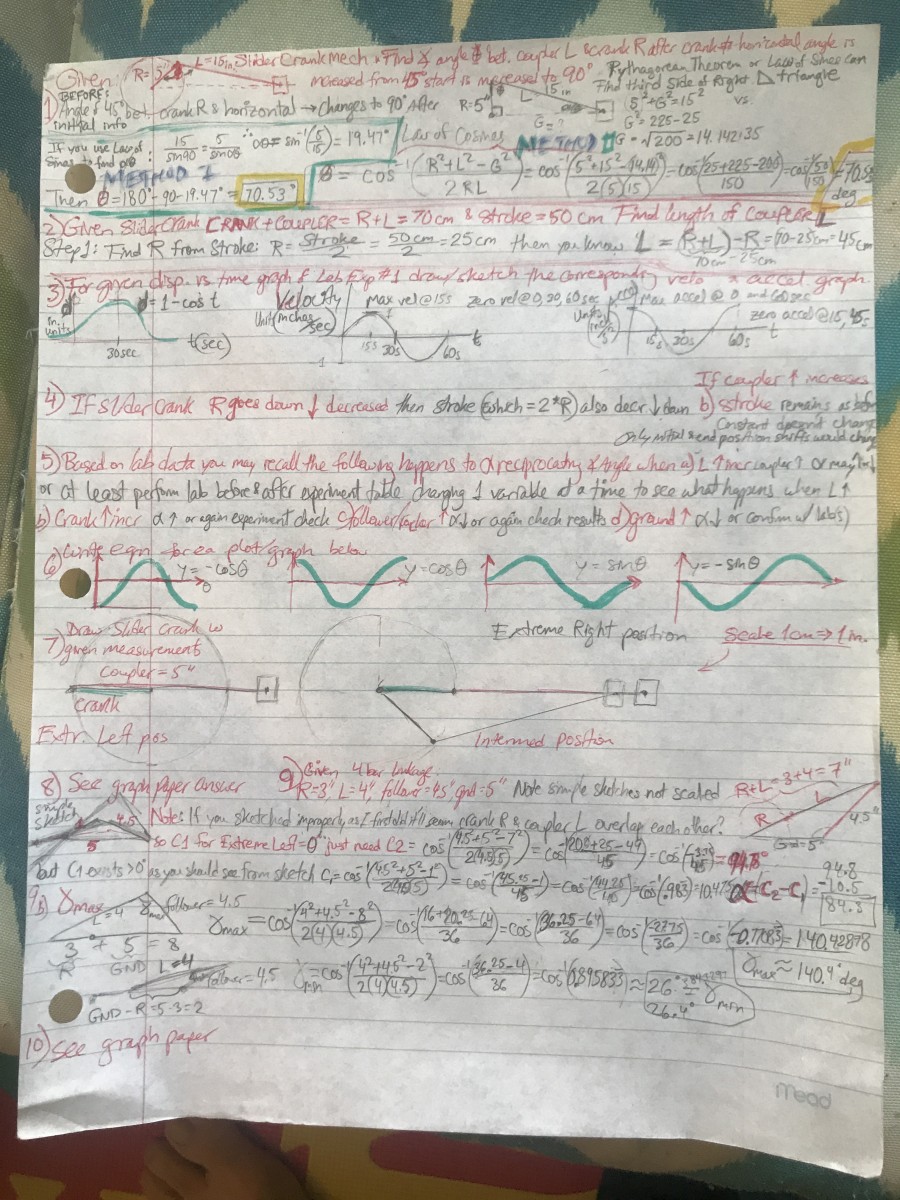
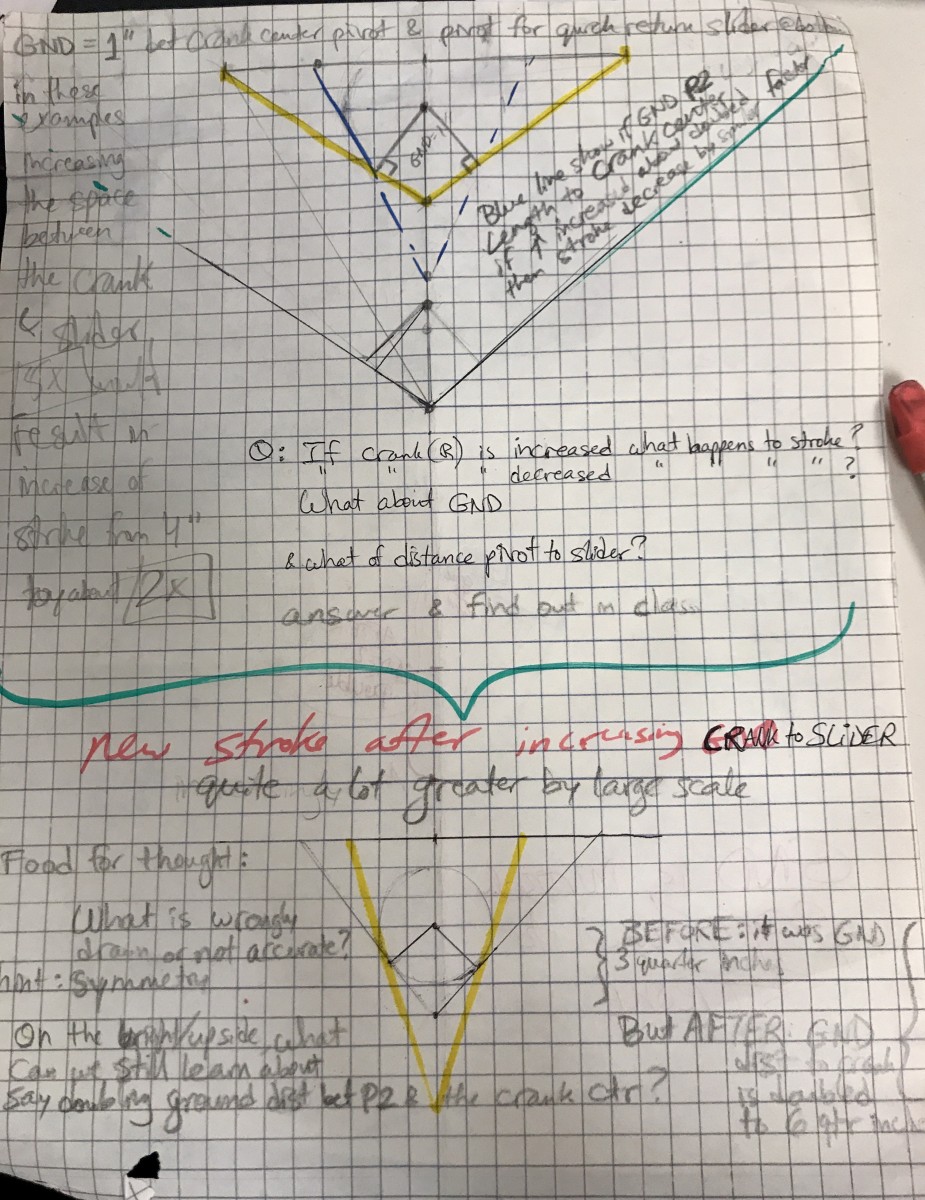
Lab 3 Quick Return mechanism
Notes for Slider Crank

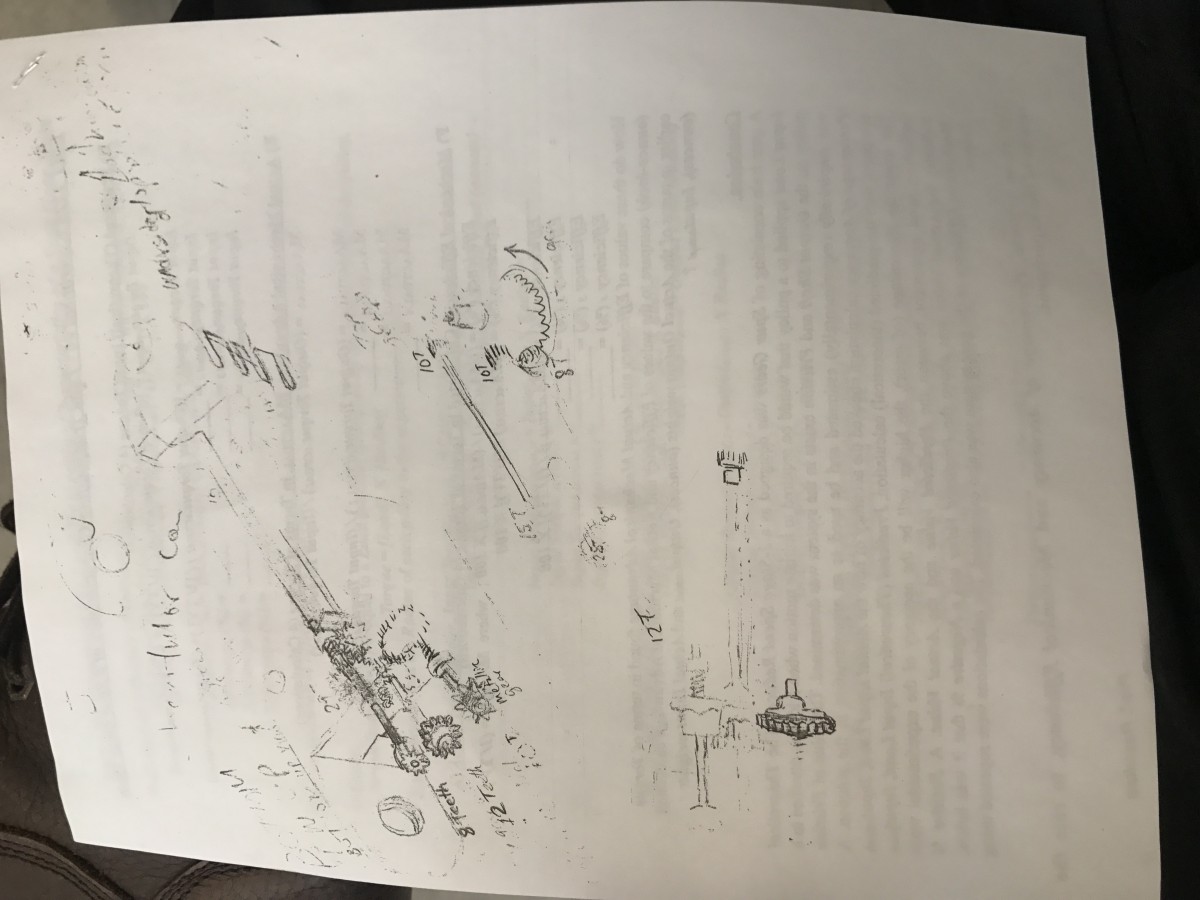
Notes on gears
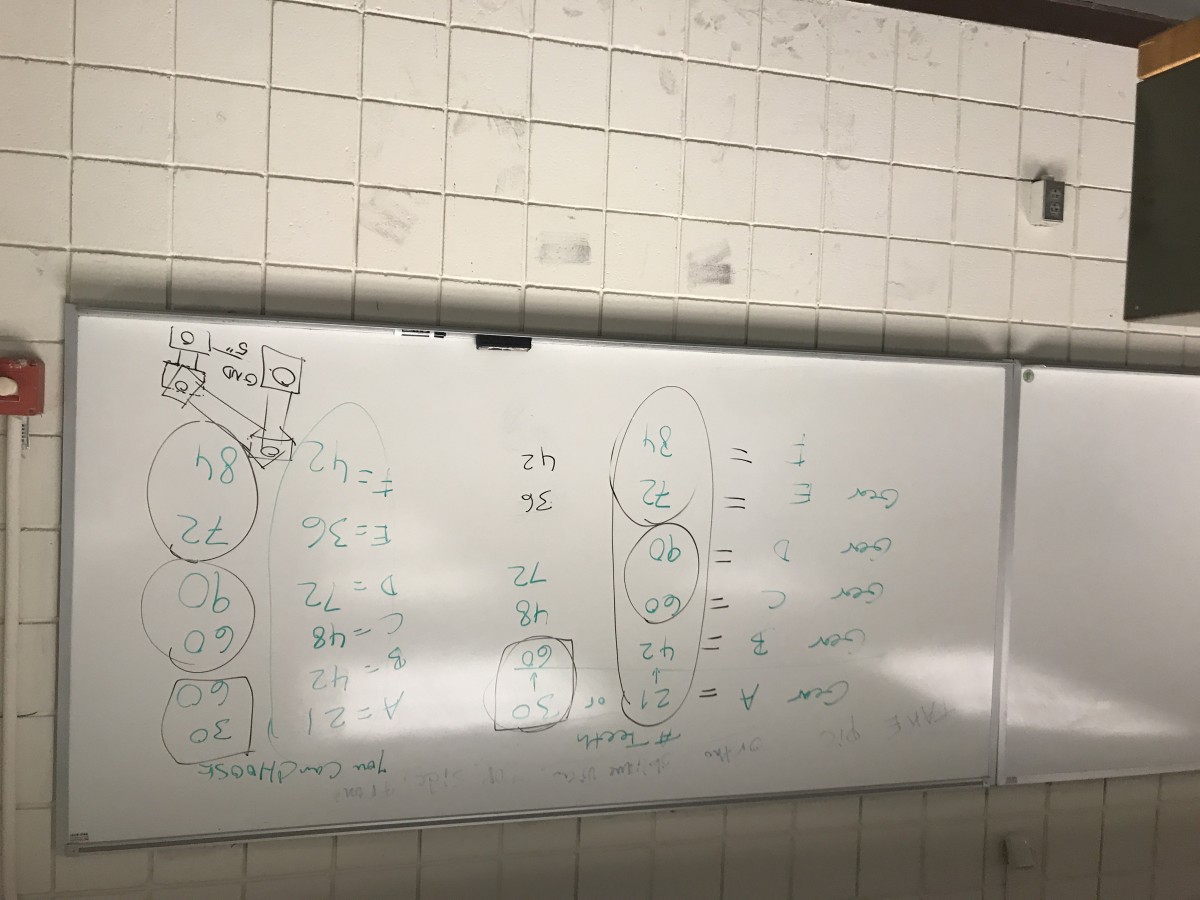
Selecting appropriate gear ratios based on lab 4
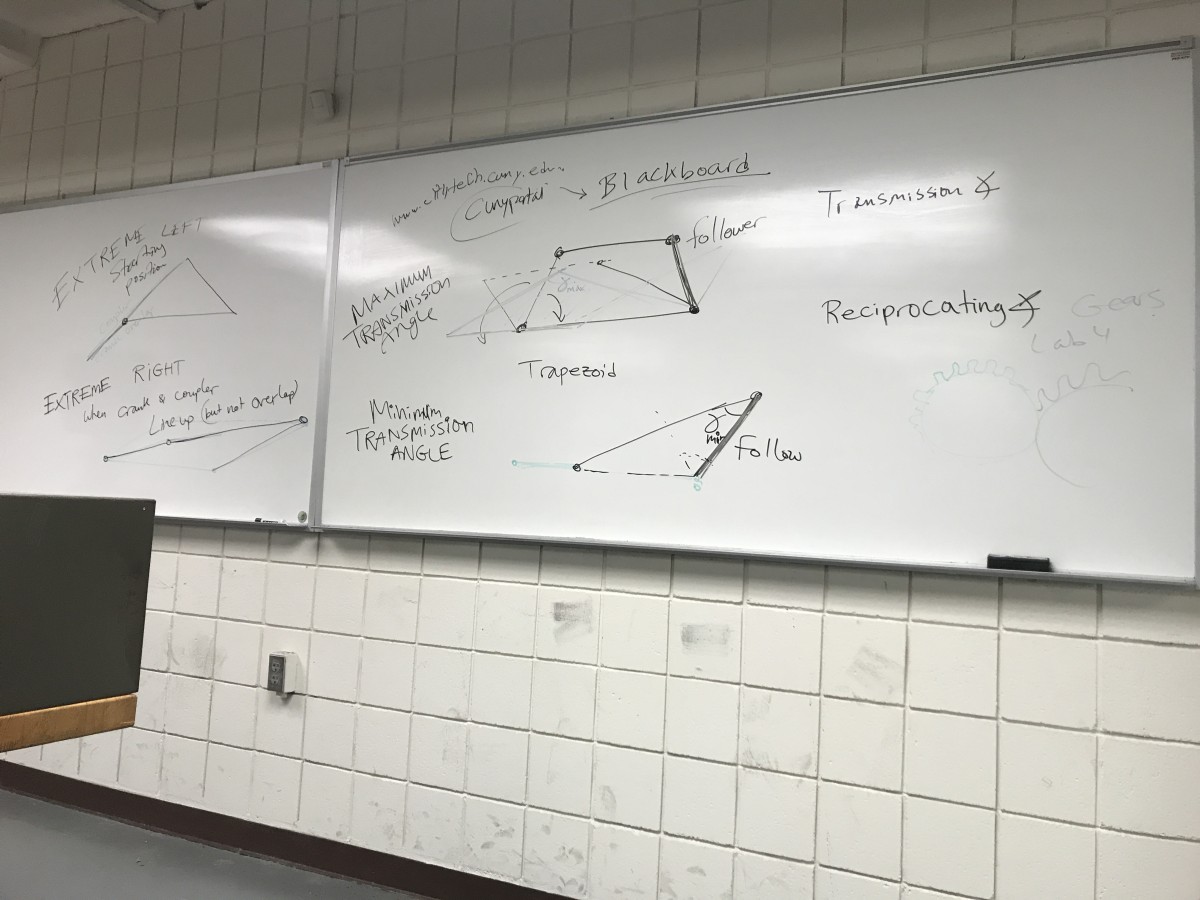
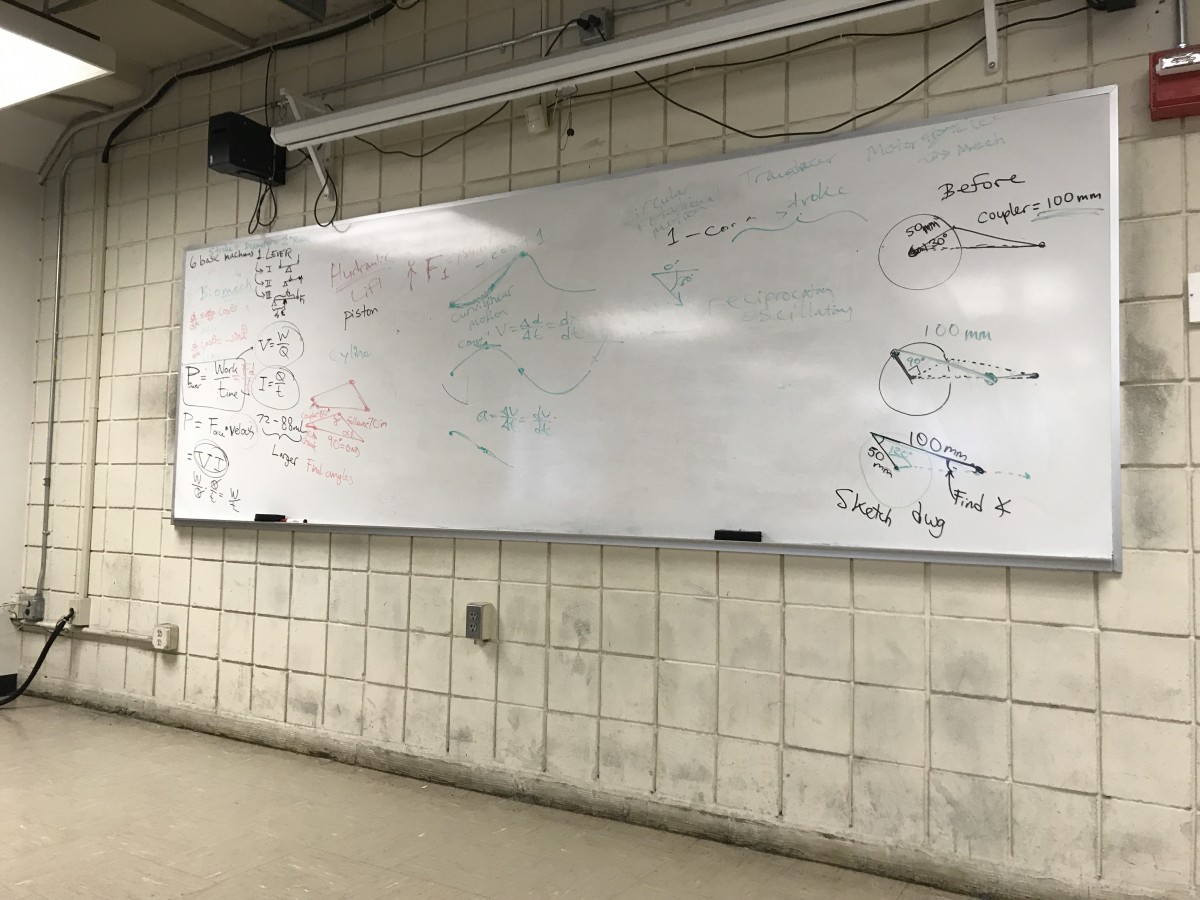
Main positions for Four Bar Linkage Mechanism
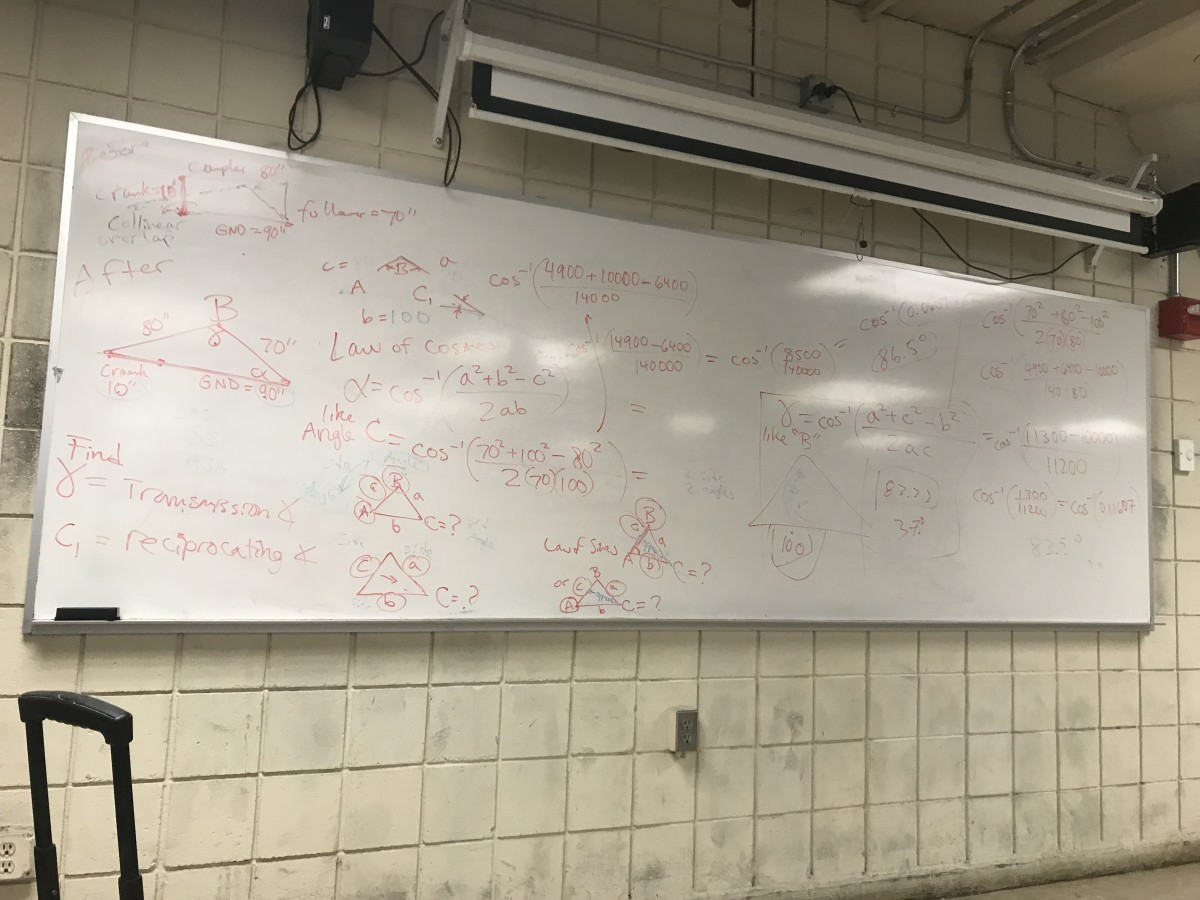
Using Law of Cosines profusely

This sample above shows how it may not be recommended to set up gear wheel shafts with respect to the grooves/slots in the breadboard(note when shafts mounted on pillowblocks are parallel to the grooves, there is difficulty aligning different shafts across the “gap” space between the grooves; but if the shafts are at 90 degrees/perpendicular to the grooves then there are numerous ways to adjust the spacing from the pillowblocks sliding along the grooves to either move the shafts/gearwheels closer to other shafts/gearwheels or more distant
The picture just above these words shows shafts perpendicular to the breadboard slots/grooves so that there is easier adjustment between gearshafts spacing closer or farther (which is not depending on the standard “gap” of the breadboard as in the prior initial picture)
Simple sketch for lab 7 (came out etchy) This just shows samples of a robotic arm
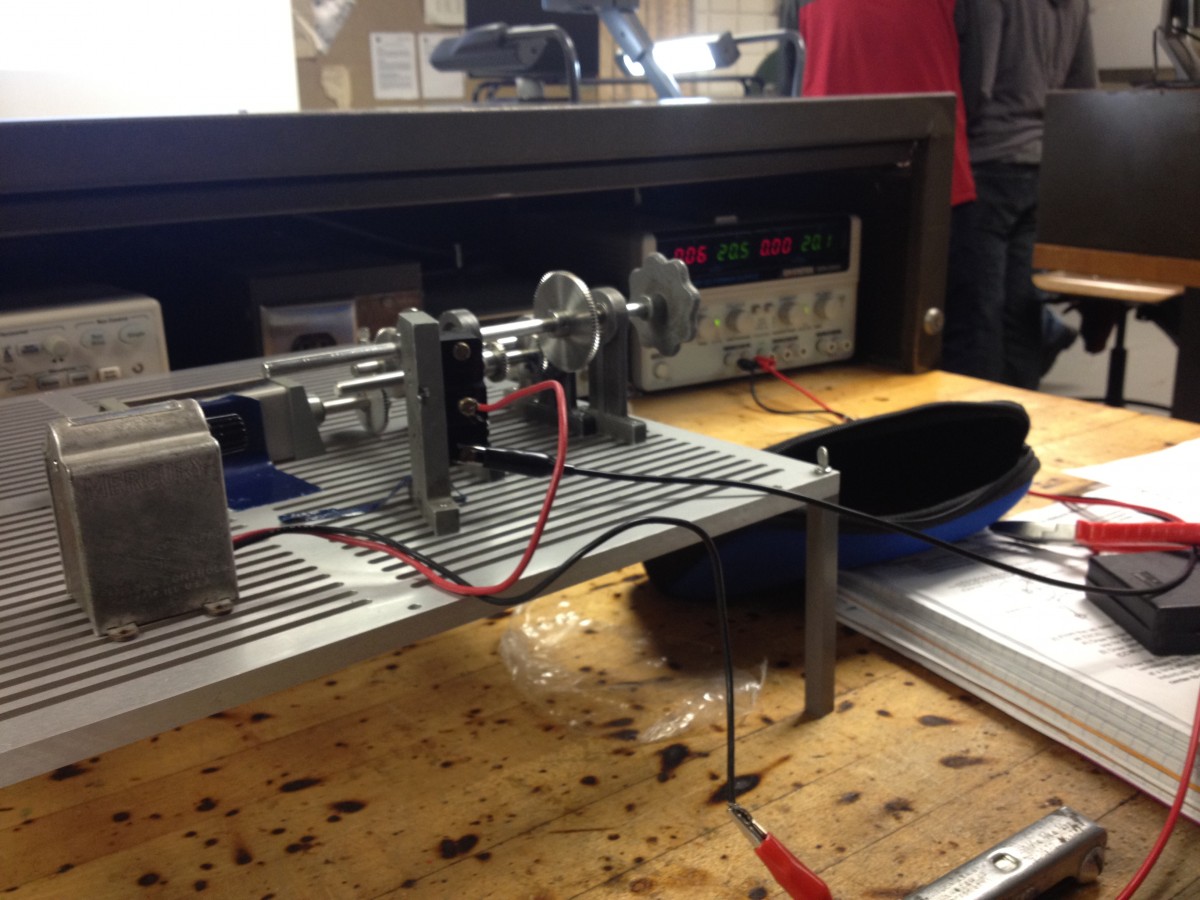
This sample picture just shows the elctromechanical counter on the bottom left and mechanical counter more towards top left
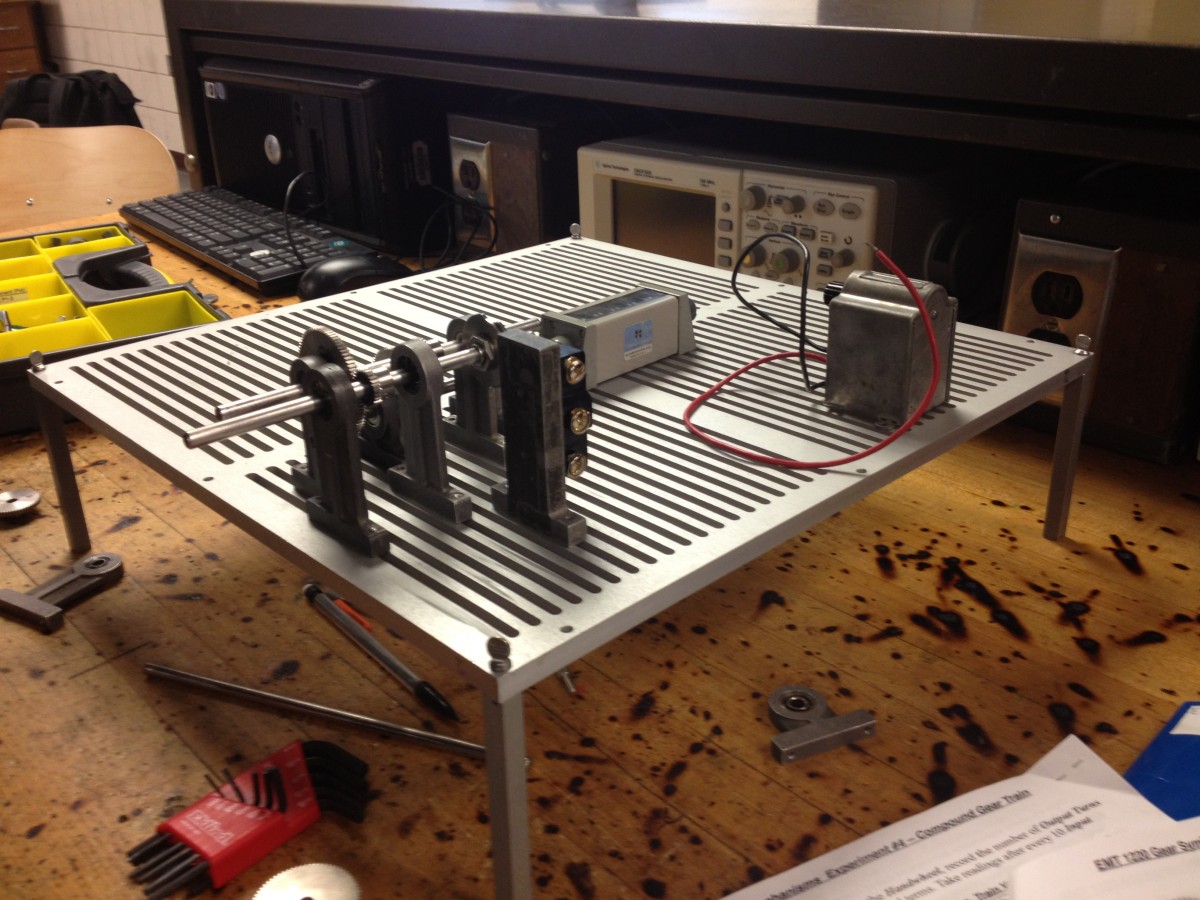
As already mentioned in another post this sample picture shows mechanical setup where the shafts are parallel to breadboard slots(this can cause problems adjusting spacing between gear shafts; can you see why?)
Proper aligning of shafts relative to breadboard slots is key
Basic Homework Question is related to this
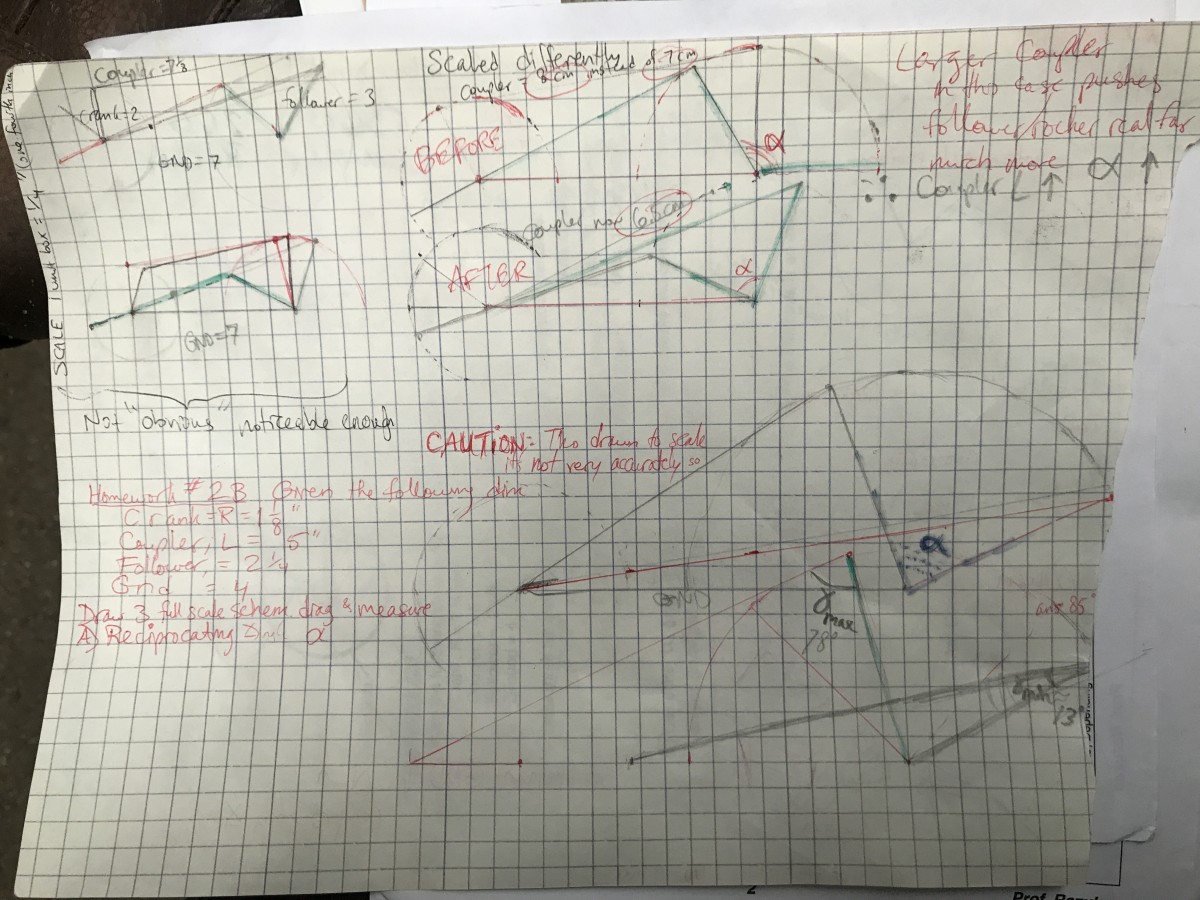
Four-Bar Linkage drawings of Extreme Left vs Extreme Right positions (top left sketch); showing scaling dimensions using centimeters rule(see two top right larger drawings of graph paper sketches) on ruler instead of inches
this temporary site location for hw practice for exam. Please try understanding AND answering BOTH computer-prepared printed sheets AND use my messy/sloppy graphing paper attempts on your own! Show me for some credit to test & use www.mekanizmalar.com/fourbar.html as you were shown.. Do a search for Four Bar linkage on YouTube for ideas and helpful aids understanding certain basic principles like https://www.youtube.com/results?search_query=four+bar+linkage
Some Internet Research topics of interest ![]()

Useful videos to watch (if you haven’t already): How Watts Straight Line Motion mechanism works : https://www.youtube.com/watch?v=bsRmE5AU9x0
Chebyshev’s Straight Line Linkage: https://www.youtube.com/watch?v=ztMuScgSCHs
Kinetic art, Perpetual motion, Marble Machine: https://www.youtube.com/watch?v=ruiQR3CZE7k
7 Amazing Science Gadgets https://www.youtube.com/watch?v=wcKyq-e-Soo
Below is a sample link to a particular type of engines but look out for others on pumps, drives(like VFDs), motors (like brushless, stepper, servos), and applications for systems like incremental encoder, uchip on kickstarter, even just something that seems as simple as Hall sensors
Welcome to City Tech OpenLab within the EMT 1220 Mechanisms Lab course intro page. See below for more useful info you may need to access as a www.CityTech.CUNY.edu student
The OpenLab is an open-source, digital platform designed to support teaching and learning at City Tech (New York City College of Technology), and to promote student and faculty engagement in the intellectual and social life of the college community.