
TEAM QUAD-ROTOR
Team members:
Marcos Lambirty- Crew Head
Vincent Gil- Head Pilot
Steven Ciorciari- Head Coder
Sergio-Isidoro Lombardo- Head Builder
We did it! It may not have ended how we thought but we got it to do something, and I think that’s something to be proud of.
-When we first started we decided that we would build our own quad-rotor from scratch using and Arduino board
-When it was brought to our attention that building would be harder then we thought and take much longer then we had we decided to buy our own and add some cool stuff. We bought the Lil’ Dragonfly rotor:

and that we would add some accelerometers and some giros:


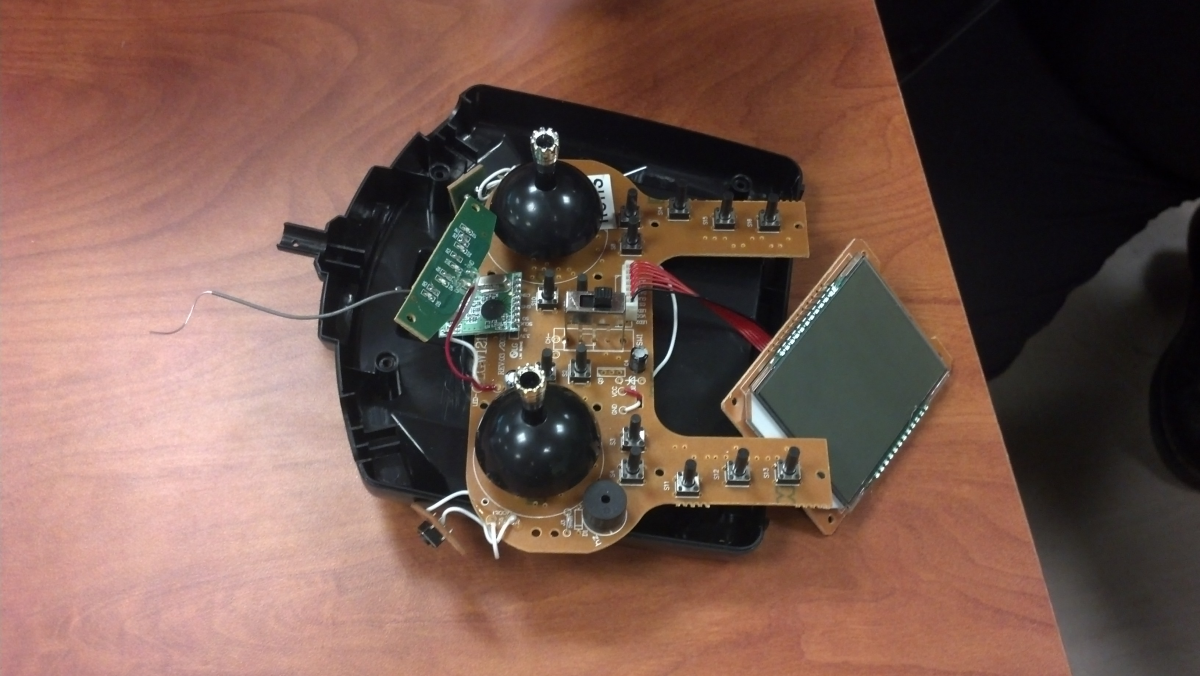
– Then Disaster struck. After getting some recordings of how much power the board on the rotor puts out it wouldn’t fly. No mater what we did the controller would not connect to the rotor. So we took it apart to see what we could find
– We found that the controller itself was not build to the best of standers, we emailed the company and they were able to sent us a new controller for free.

-Unfortunately this didn’t even work as well. We were forced to take matters into our own hands.
– During this time we were able to set up the accelerometers and wright the code to output the numbers that we needed should we have been able to attach it to a flying rotor.
Here is the video of the code in action:
https://www.youtube.com/watch?v=sNogHIdOb-A
– All of us sat down together and had a discussion. What would be the project now that the rotor didn’t fly? We all agreed that are new plan would simply to get it going again. What could we do to make our rotor fly again?
– After stripping the rotor of its own board we went to connect all of the motors on it together and power it though an Arduino board. Firts we attached each motor to the Arduino to see if they could power them. We found that it was enough power to turn them on. Then we wired all of them together and attached them the one of the Arduino Diecimila boards. Then using the simple blink code we were able to power the rotors and have some control by turning them on and off.

-Here is the video of the rotors being powered of the Arduino Board:
https://www.youtube.com/watch?v=V-AdsTItoVM
-In the end we got the what we wanted if we had decided that we wanted to build our own Quad-Rotor. This would be our starting point: just getting the rotors to turn on and off from and Arduion.
Equipment List:
- 1 Arduino Diecimila board
- 1 Lil’ Dragonfly Quad-Rotor
- 2 feet of copper cable
- 1 Arduino power cord
- Arduino Blink Code
- Non-Lead Solder
- Soldering Iron
- Lots of praying
Here Is a short Video explaing everything that happened during this:
https://www.youtube.com/watch?v=863bvtiUodc


twas a long and arduous journey friend but alas we are clearly not cut out for making flying contraptions.
nonsense everyone is meant to make flying contraptions, the only difference is how far it will fly. You are only temporarily grounded.