
Throughout the course of this week, our team decided that to ensure accomplishing each portion of the project in a timely and easy manner, we must break down the testing and of the parts (i.e. servo motors, proximity sensors) and code one step at a time and make sure we understand how each part works before we proceed.
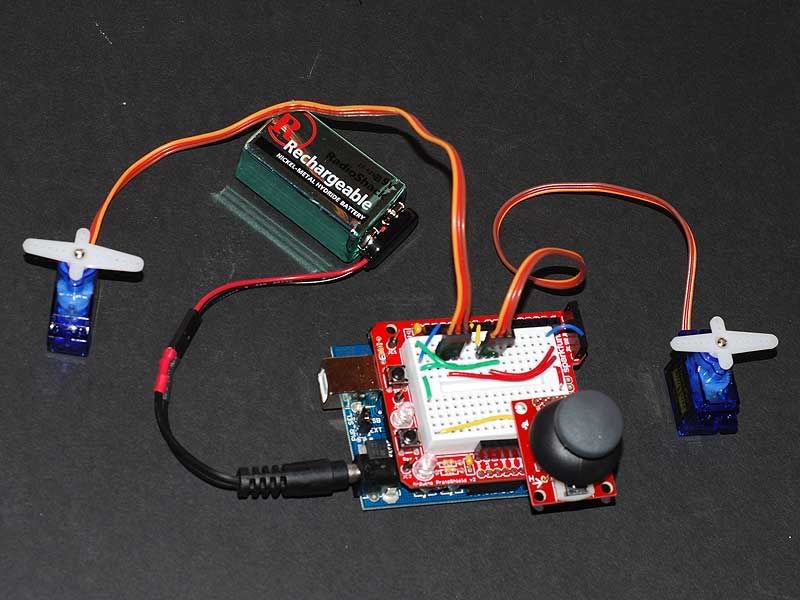
This week was mostly about testing the servo motors (much like we did in class), but I have been trying to find a way to utilize two servo motors on one Arduino board. The purpose of this is because for the finished product, the bunny ears will constantly move back and forth 180 degrees when someone gets close to the bunny. As of this writing, I have a found a way to make it work without using two Arduino boards, we could simply use a breadboard as one possible solution. From there, I will test this theory and functionality of the servo motors by creating the code necessary that will allow for both servo motors to rotate simultaneously. Furthermore, I have currently been researching the code necessary to utilize two servo motors in conjunction with the proximity sensor and with the help of Professor Baker (and good ol’ Google (and the arduino site)), I have found the code that will allow me to finally accomplish this task.
Videos that shows the task I am currently trying to accomplish with the servo motors:
https://www.youtube.com/watch?v=epm65GrxWMo
The next step will be to research and test out the code for the LED Lights and sound that will play in accordance with distance via IR proximity sensors. Eventually, I will also work on implementing the totality of the code to work simultaneously.


Great job Frank! Thank you so much! I already ordered a second servo; hopefully it will arrive by Thursday, so we’ll be able to test both of them together.