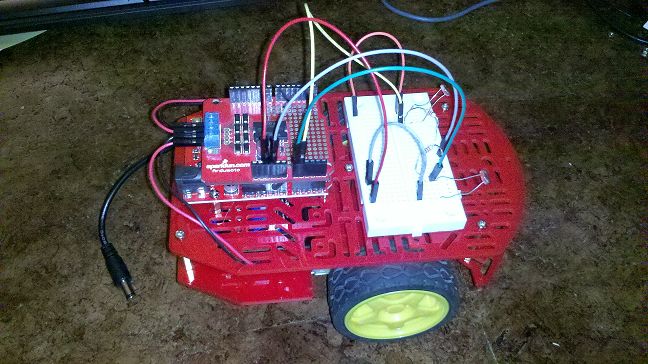
This project my partner and I build and programmed this robot and our objective was make the robot turn and move towards the light.
int pwm_a = 10; //PWM control for motor outputs 1 and 2 is on digital pin 10
int pwm_b = 11; //PWM control for motor outputs 3 and 4 is on digital pin 11
int dir_a = 12; //direction control for motor outputs 1 and 2 is on digital pin 12
int dir_b = 13; //direction control for motor outputs 3 and 4 is on digital pin 13
int incomingByte = 0; // for incoming serial data
int encoderCount=0;
int encoderOld=0;
int encoderState=0;
int sensorState=0;
int lightsensor_left=0;
int lightsensor_right=0;
int temp_var=0;
int gain=2; // control system gain var
const int encoderPin = 2;
const int sensorPin = 3;
void setup()
{
pinMode(pwm_a, OUTPUT); //Set control pins to be outputs
pinMode(pwm_b, OUTPUT);
pinMode(dir_a, OUTPUT);
pinMode(dir_b, OUTPUT);
analogWrite(pwm_a, 0); //set both motors to run at (100/255 = 39)% duty cycle (slow)
analogWrite(pwm_b, 0);
Serial.begin(115200);
Serial.print("Zagros Robotics, Inc.");
Serial.print("Magician Light Follower Demo 4/6/2013\n ");
}
void loop()
{
// Serial.print("Zagros Robotics, Inc.");
if (Serial.available() > 0) {
// read the incoming byte:
incomingByte = Serial.read();
}
//read light sensors
lightsensor_left=analogRead(0);
lightsensor_right=analogRead(1);
Serial.println(lightsensor_left);
Serial.println(lightsensor_right);
switch(incomingByte)
{
case 's':
digitalWrite(dir_a, LOW);
analogWrite(pwm_a, 0);
digitalWrite(dir_b, LOW);
analogWrite(pwm_b, 0);
Serial.println("Stop\n");
incomingByte='*';
break;
case 'f':
digitalWrite(dir_a, LOW);
analogWrite(pwm_a, 255);
digitalWrite(dir_b, LOW);
analogWrite(pwm_b, 255);
Serial.println("Forward\n");
incomingByte='*';
break;
case 'b':
digitalWrite(dir_a, HIGH);
analogWrite(pwm_a, 255);
digitalWrite(dir_b, HIGH);
analogWrite(pwm_b, 255);
Serial.println("Backward\n");
incomingByte='*';
break;
case 'l':
digitalWrite(dir_a, LOW);
analogWrite(pwm_a, 255);
digitalWrite(dir_b, HIGH);
analogWrite(pwm_b, 255);
Serial.println("Rotate Left\n");
incomingByte='*';
break;
case 'r':
digitalWrite(dir_a, HIGH);
analogWrite(pwm_a, 255);
digitalWrite(dir_b, LOW);
analogWrite(pwm_b, 255);
Serial.println("Rotate Left\n");
incomingByte='*';
break;
case 'g': //follow the light
gain = 5;
temp_var = (lightsensor_left - lightsensor_right)*gain;
if (temp_var > 0)
{
digitalWrite(dir_a, HIGH);
digitalWrite(dir_b, LOW);
Serial.println("Rotate Left\n");
}
else
{
digitalWrite(dir_a, LOW);
digitalWrite(dir_b, HIGH);
Serial.println("Rotate Right\n");
}
Serial.println(temp_var);
temp_var=abs(temp_var);
if(temp_var > 255)
{
temp_var = 255;
}
analogWrite(pwm_a, temp_var);
analogWrite(pwm_b, temp_var);
break;
case 'v':
Serial.println("Version 04042013a\n");
incomingByte='*';
break;
delay(500);
}
} // end loop
Pictures