After decided what I had to implement into the installation I had to program each part of the installation breaking them down into :-
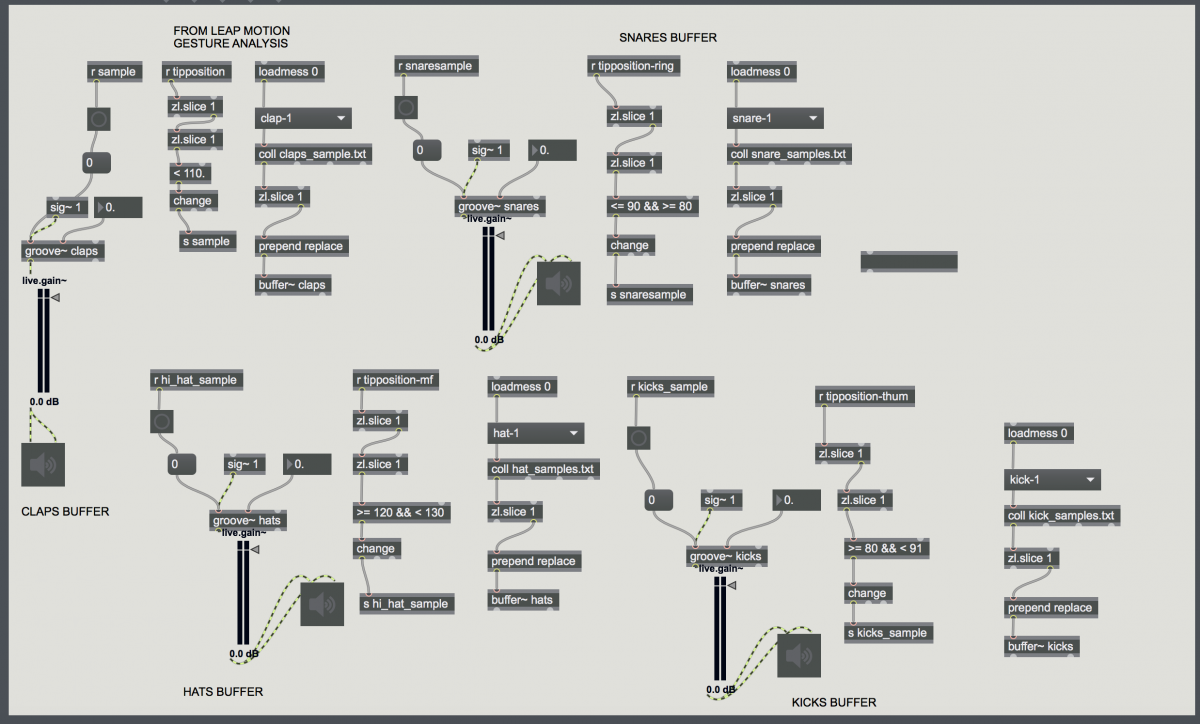
Audio Engine
This was the audio part of the installation I had to map all the finger data I was getting from the leap motion to max and set the fingertip ids to their specific buffer and groove. The more fingers that were added the more complex it got because some fingers clashed with each other if they were on the same interval thus I had to set a different position in the Y-axis for each finger so they would not collide and output data that is relevant to their respect positions. I selected a group of samples that consisted of claps, kicks, hi-hats and snares and connected them to the same buffer that was associated with the fingers and used the finger data to trigger them. Each buffer had a collection of its on special samples so that there was a claps buffer, hi-hat buffer, kicks buffer etc. It made them more manageable and allowed for easy modifications since everything was modularized
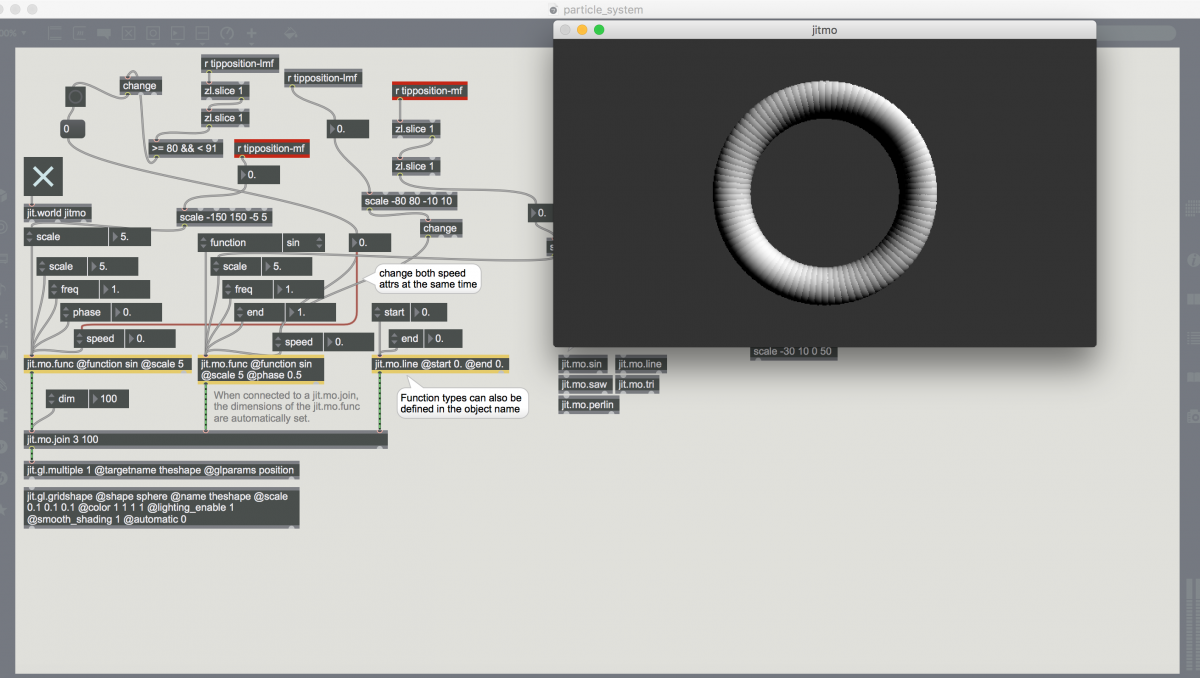
Particle system
The particle system was created using the help of jit.mo a max library that lets you create primitive shapes that you can be able to alter the scale, frequency, speed and even shape of the object. I used the tip position data I got from the leap motion to route the finger movements to alter the speed, frequency etc. Thus the audio engine was intertwined with the audio engine because they both needed each other to function. Motion in the Y direction over the leap motion caused the scale of the shape to go higher while motion down towards the leap made it shrink. Motion in the X either left or right direction decrease or increased its speed but also scaled the shape toward the left or right respectively.