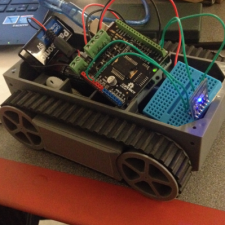
Building a Tank Robot using Arduino
- OpenOpen
We use Pin 5,6 for Speed Control and Pin 4, 7 for Direction Control
For function of our movements we use goForward(), goBackword(), rotateRight(), and rotateLeft()
We use PWM(Pulse Width Modulation) to control speed. We use the value between 0 to 255. For example if we want to moveforward for 2 seconds at full speed we would use “goForward(2000,255)”
In the Program we use digitalWrite(m1direction,direction) to set the motor direction. The value for direction is HIGH for forward or LOW for backward.
We use analogWrite(m1speed, pwm) to control the speed. The value for pwm is 0-255. That means if it is 127 then it has 50% duty cycle in Square wave form and if it is 255 then it is 100% Duty cycle.
Recent Discussions
Sorry, there were no discussion topics found.
Recent Docs
No Recent Docs


