Description:
In this lab we needed to select a team of 3-4 students to work with a device it that is sensors, servo motor and RFID. My group members decided to to the servo motor as one of the devices we need to work on. We use the Phidget resource that the professor provide us in order to get familiar with the programming of C coding of the servo motor. In the servo motor we needed to activate the servo or exit and execute accordingly. Using C programming to make the servo work.
Code:
#include <stdio.h>
#include <Phidget21/phidget21.h>
int CCONV AttachHandler(CPhidgetHandle ADVSERVO, void *userptr)
{
int serialNo;
const char *name;
CPhidget_getDeviceName (ADVSERVO, &name);
CPhidget_getSerialNumber(ADVSERVO, &serialNo);
printf(“%s %10d attached!\n”, name, serialNo);
return 0;
}
int CCONV DetachHandler(CPhidgetHandle ADVSERVO, void *userptr)
{
int serialNo;
const char *name;
CPhidget_getDeviceName (ADVSERVO, &name);
CPhidget_getSerialNumber(ADVSERVO, &serialNo);
printf(“%s %10d detached!\n”, name, serialNo);
return 0;
}
int CCONV ErrorHandler(CPhidgetHandle ADVSERVO, void *userptr, int ErrorCode, const char *Description)
{
printf(“Error handled. %d – %s\n”, ErrorCode, Description);
return 0;
}
int CCONV PositionChangeHandler(CPhidgetAdvancedServoHandle ADVSERVO, void *usrptr, int Index, double Value)
{
printf(“Motor: %d > Current Position: %f\n”, Index, Value);
return 0;
}
//Display the properties of the attached phidget to the screen. We will be displaying the name, serial number and version of the attached device.
int display_properties(CPhidgetAdvancedServoHandle phid)
{
int serialNo, version, numMotors;
const char* ptr;
CPhidget_getDeviceType((CPhidgetHandle)phid, &ptr);
CPhidget_getSerialNumber((CPhidgetHandle)phid, &serialNo);
CPhidget_getDeviceVersion((CPhidgetHandle)phid, &version);
CPhidgetAdvancedServo_getMotorCount (phid, &numMotors);
printf(“%s\n”, ptr);
printf(“Serial Number: %10d\nVersion: %8d\n# Motors: %d\n”, serialNo, version, numMotors);
return 0;
}
int servo_simple()
{
int result;
double curr_pos;
const char *err;
double minAccel, maxVel;
//Declare an advanced servo handle
CPhidgetAdvancedServoHandle servo = 0;
//create the advanced servo object
CPhidgetAdvancedServo_create(&servo);
//Set the handlers to be run when the device is plugged in or opened from software, unplugged or closed from software, or generates an error.
CPhidget_set_OnAttach_Handler((CPhidgetHandle)servo, AttachHandler, NULL);
CPhidget_set_OnDetach_Handler((CPhidgetHandle)servo, DetachHandler, NULL);
CPhidget_set_OnError_Handler((CPhidgetHandle)servo, ErrorHandler, NULL);
//Registers a callback that will run when the motor position is changed.
//Requires the handle for the Phidget, the function that will be called, and an arbitrary pointer that will be supplied to the callback function (may be NULL).
CPhidgetAdvancedServo_set_OnPositionChange_Handler(servo, PositionChangeHandler, NULL);
//open the device for connections
CPhidget_open((CPhidgetHandle)servo, –1);
//get the program to wait for an advanced servo device to be attached
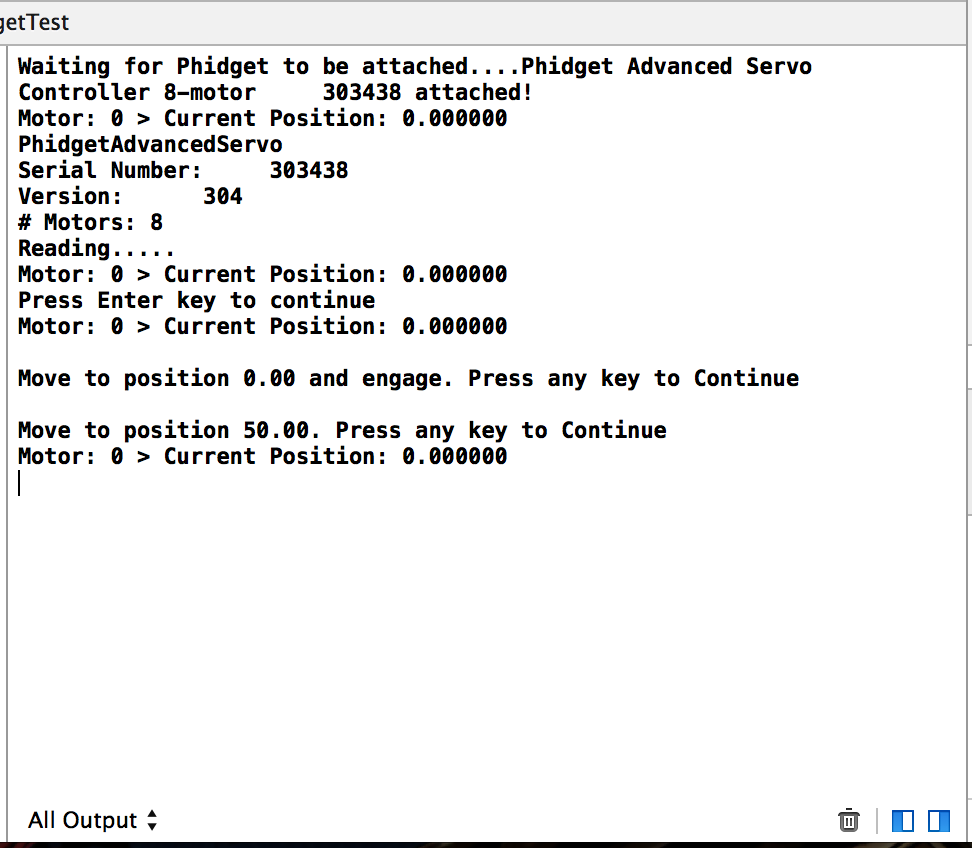
printf(“Waiting for Phidget to be attached….”);
if((result = CPhidget_waitForAttachment((CPhidgetHandle)servo, 10000)))
{
CPhidget_getErrorDescription(result, &err);
printf(“Problem waiting for attachment: %s\n”, err);
return 0;
}
//Display the properties of the attached device
display_properties(servo);
//read event data
printf(“Reading…..\n”);
//This example assumes servo motor is attached to index 0
//Set up some initial acceleration and velocity values
CPhidgetAdvancedServo_getAccelerationMin(servo, 0, &minAccel);
CPhidgetAdvancedServo_setAcceleration(servo, 0, minAccel*2);
CPhidgetAdvancedServo_getVelocityMax(servo, 0, &maxVel);
CPhidgetAdvancedServo_setVelocityLimit(servo, 0, maxVel/2);
//display current motor position
if(CPhidgetAdvancedServo_getPosition(servo, 0, &curr_pos) == EPHIDGET_OK)
printf(“Motor: 0 > Current Position: %f\n”, curr_pos);
//keep displaying servo event data until user input is read
printf(“Press any key to continue\n”);
getchar();
//change the motor position
//valid range is -23 to 232, but for most motors ~30-210
//we’ll set it to a few random positions to move it around
//Step 1: Position 0.00 – also engage servo
printf(“Move to position 0.00 and engage. Press any key to Continue\n”);
getchar();
CPhidgetAdvancedServo_setPosition (servo, 0, 0.00);
CPhidgetAdvancedServo_setEngaged(servo, 0, 1);
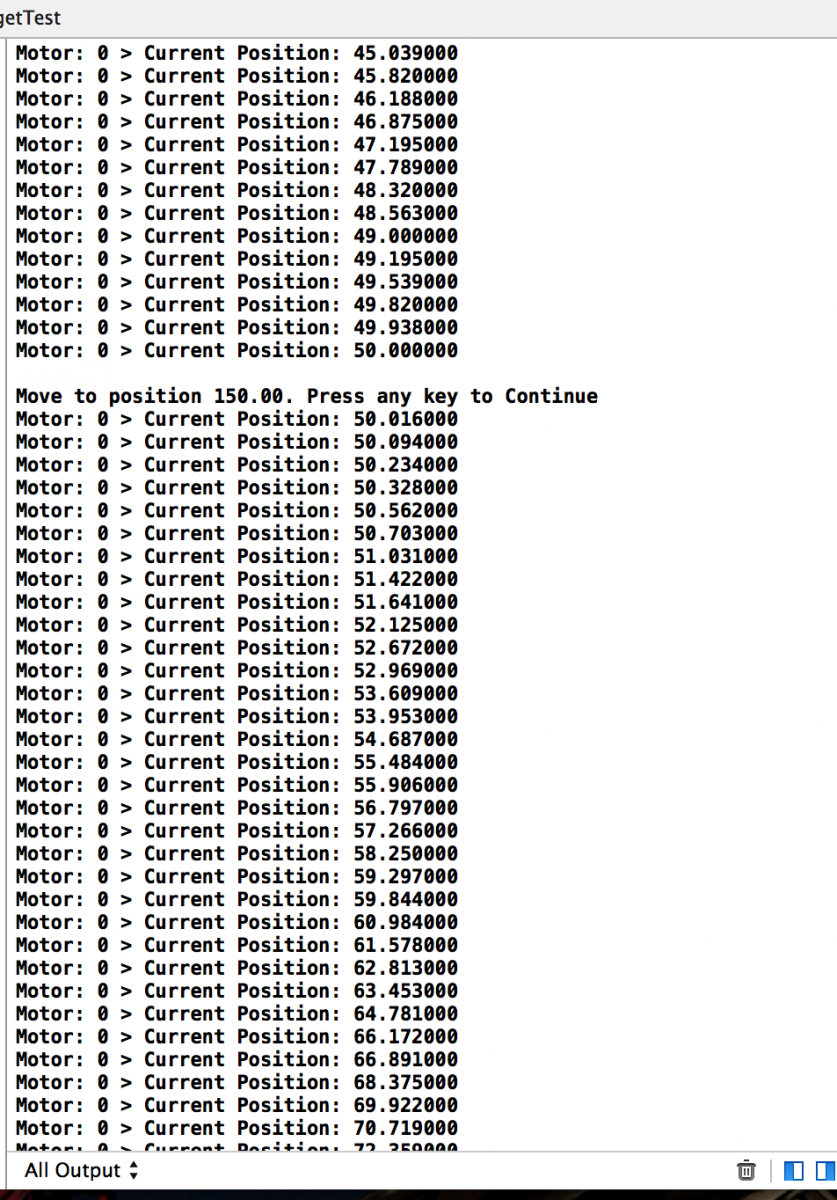
//Step 2: Position 50.00
printf(“Move to position 50.00. Press any key to Continue\n”);
getchar();
CPhidgetAdvancedServo_setPosition (servo, 0, 50.00);
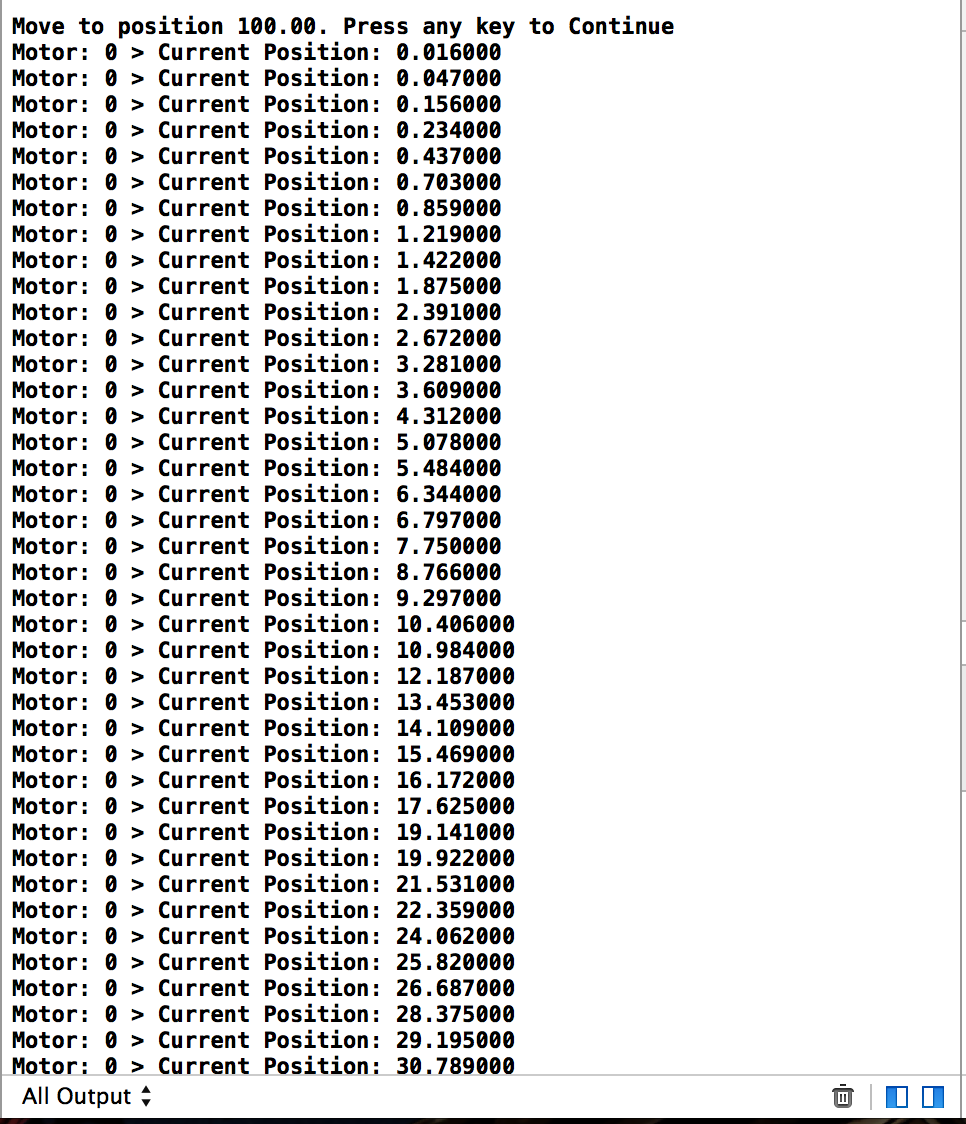
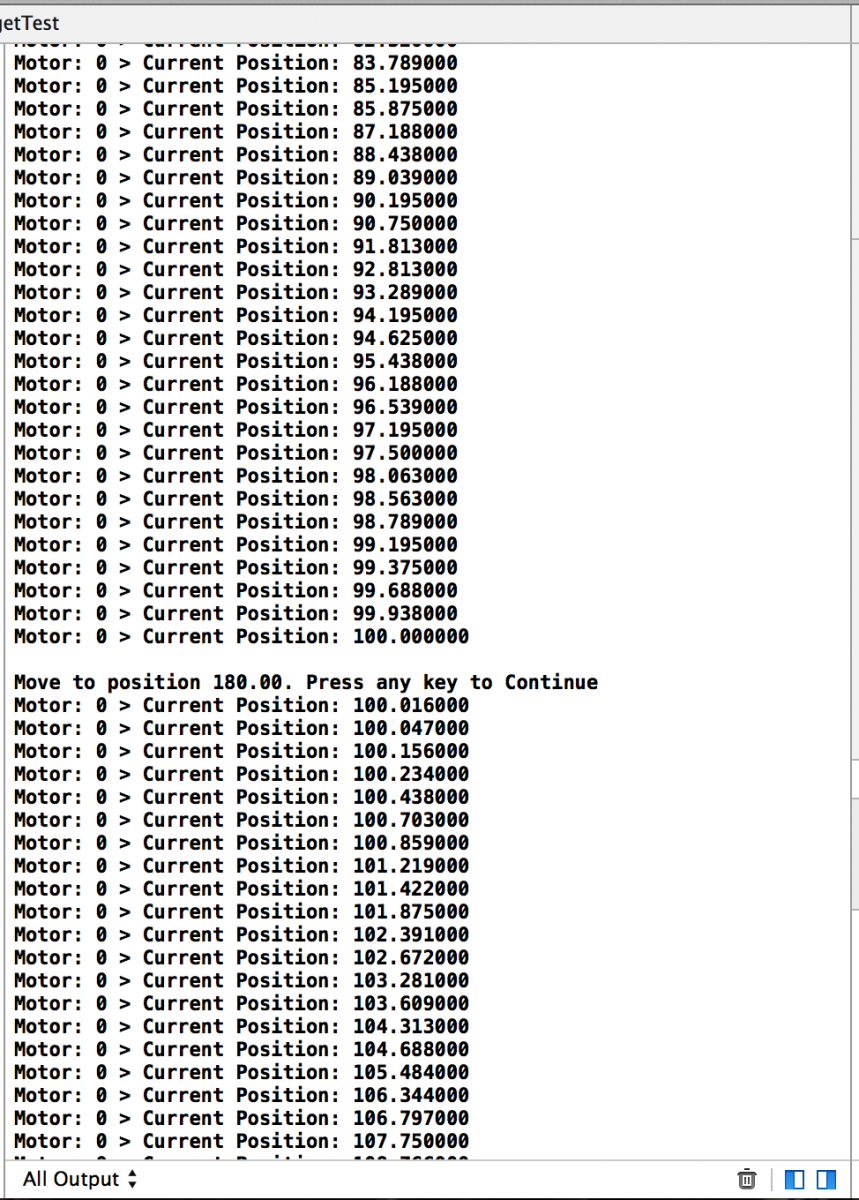
//Step 3: Position 100.00
printf(“Move to position 100.00. Press any key to Continue\n”);
getchar();
CPhidgetAdvancedServo_setPosition (servo, 0, 100.00);
//Step 4: Position 130.00
printf(“Move to position 130.00. Press any key to Continue\n”);
getchar();
CPhidgetAdvancedServo_setPosition (servo, 0, 130.00);
//Step 5: Position 180.00
printf(“Move to position 180.00. Press any key to Continue\n”);
getchar();
CPhidgetAdvancedServo_setPosition (servo, 0, 180.00);
//Step 6: Position 0.00
printf(“Move to position 0.00. Press any key to Continue\n”);
getchar();
CPhidgetAdvancedServo_setPosition (servo, 0, 0.00);
//Step 7: Disengage
printf(“Disengage Servo. Press any key to Continue\n”);
getchar();
CPhidgetAdvancedServo_setEngaged(servo, 0, 0);
printf(“Press any key to end\n”);
getchar();
//since user input has been read, this is a signal to terminate the program so we will close the phidget and delete the object we created
printf(“Closing…\n”);
CPhidget_close((CPhidgetHandle)servo);
CPhidget_delete((CPhidgetHandle)servo);
//all done, exit
return 0;
}
int main(int argc, char* argv[])
{
servo_simple();
return 0;
}
Screenshots:



0 Responses
Stay in touch with the conversation, subscribe to the RSS feed for comments on this post.