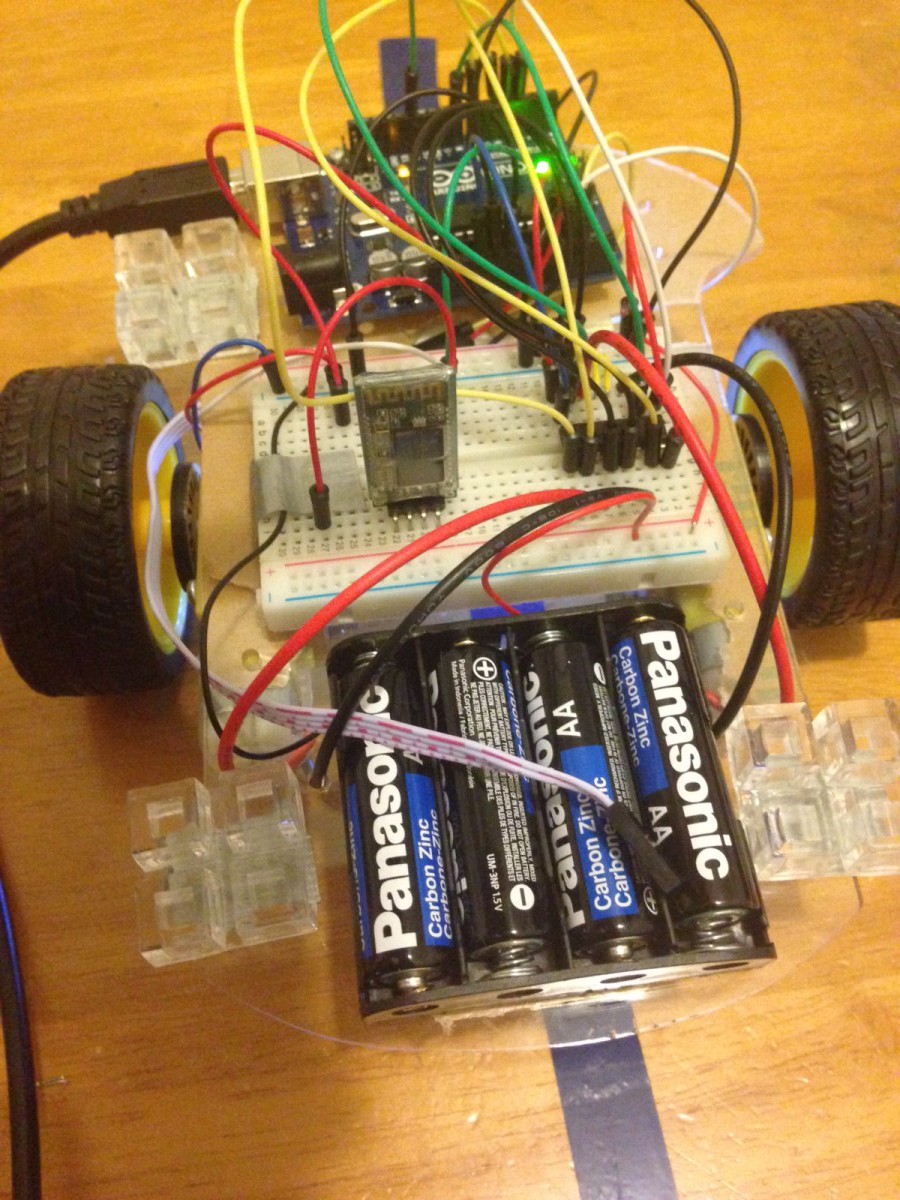
The H.S.R is a robotic system that my partner and I developed in an Electro-Mechanical Systems: Software Interface class. The system’s main goal is to follow a tape track as it constantly tests for any liquids that might be on the ground. We came up with the idea to create a robotic system that would be used in laboratory environments or other environments where potentially dangerous chemicals to humans may be used. The robot would be able to detect any liquid on the ground, stop, and alarm the user of the spill.
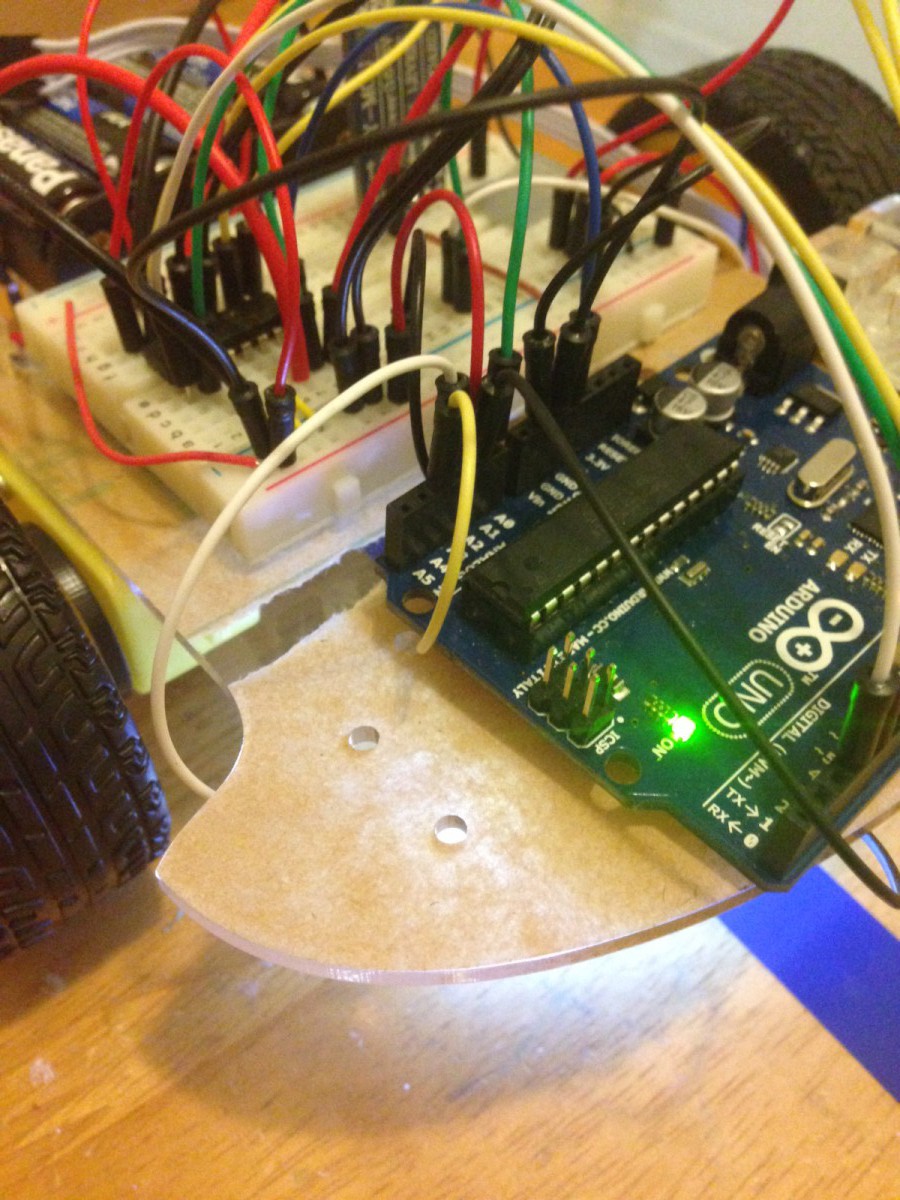
The H.S.R is controlled by the Arduino micro-controller. We were able to program the Arduino using C++ to write its code. The Arduino is able to control every aspect of the H.S.R so that we only need to turn it on via Bluetooth to operate. The Arduino uses four sensors; three photo resistors and a water sensor. The photo resistors are paired with LED’s to tell the Arduino how to adjust the wheels so it can follow the tape track provided. The water sensor is constantly looking for any moisture that the robot may come in contact with.