
In the Citytech robotic lab, there were old robotic arms that hadn’t been used for years. These robotics arms were used for industrial purposes which included handling and assembling materials. The robots were called Unimate and was of the PUMA 200 series.
The whole robot looked complicated to bring back to life because it involves doing a lot of wiring, machine programming, and more research, so I decided to start off easy. I decided to take apart the robot and take interest in only the wrist and flange of the device.
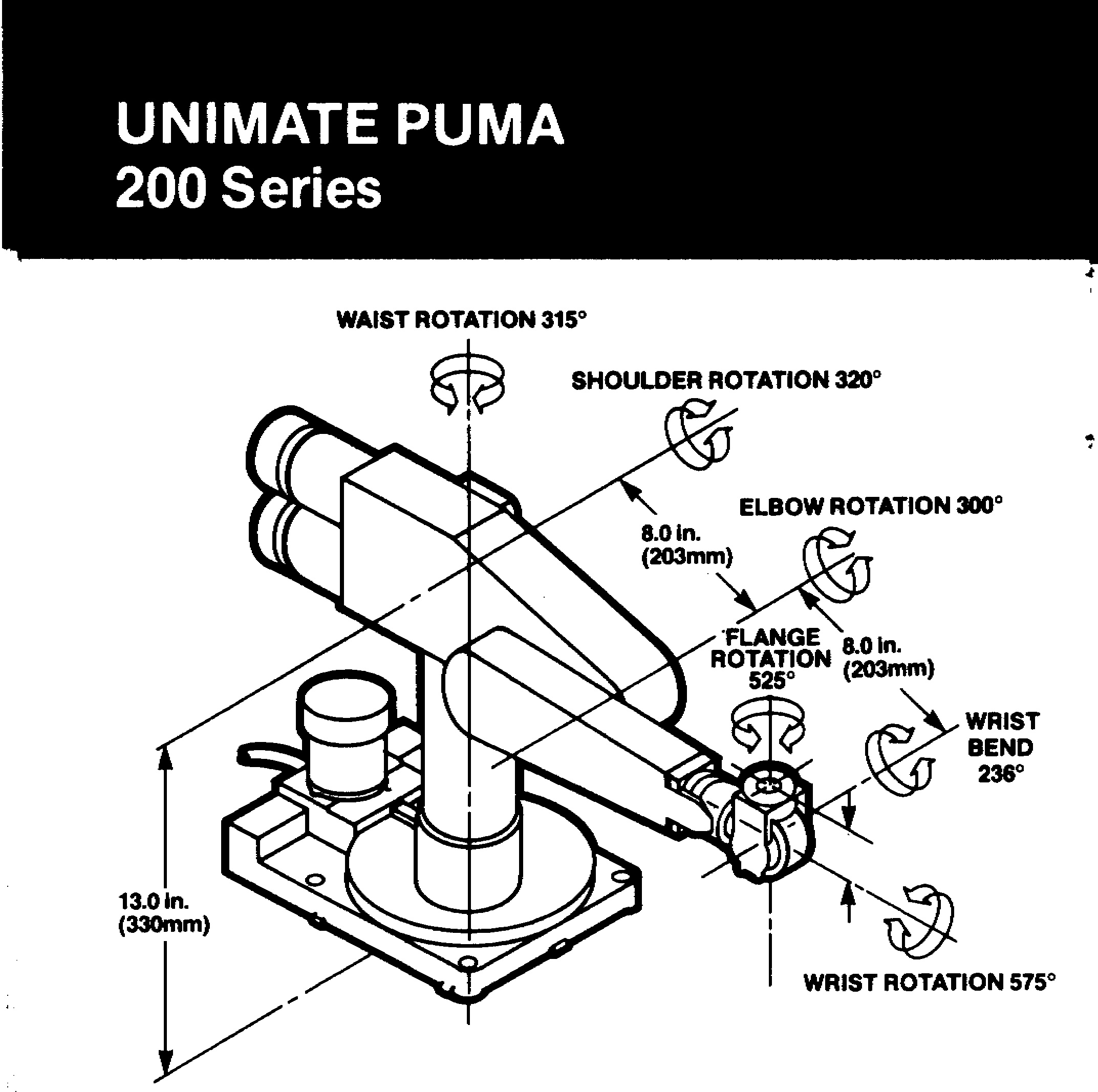
Degrees of motion
After taken off the hand of the robot, I notice a number of high precision gears located inside. I realized that motor and good programming was needed to move these gears. After selecting the appropriate gears I noticed I need a stand for hand and a place to house the motor.
I designed the gear base using SolidWorks and Inventor and manufactured a prototype using the available prototype machine. Here’s a DWF file version if you have a DWF viewer.
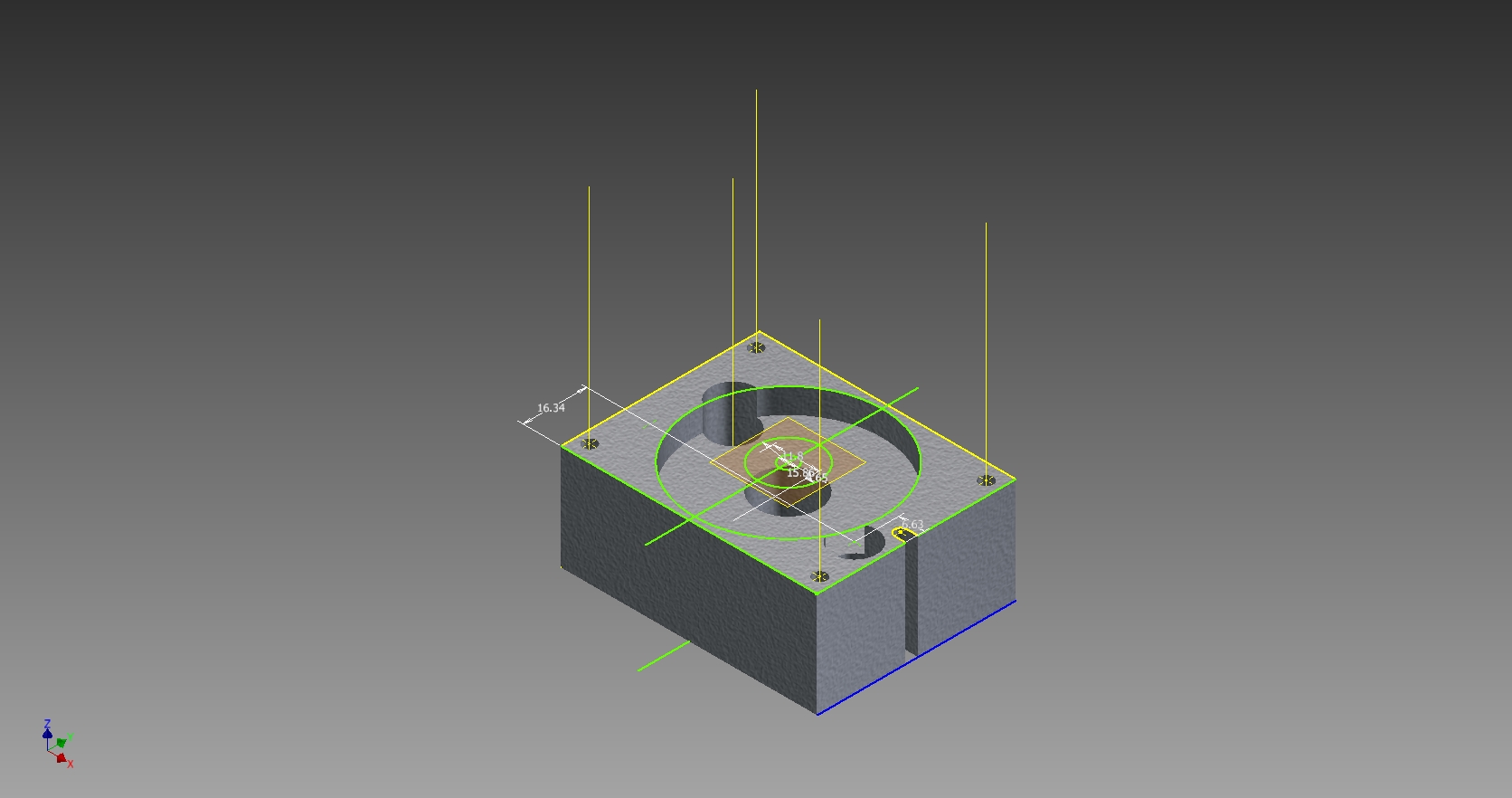
3D CAD model of Base

