
Objective: To use an Arduino board as the powering device while using a potentiometer to control a servo motor.
Materials: Servo Motor, Potentiometer as the sensor (to create an interactive device between the potentiometer and the servo motor), Arduino Duemilanove Board, Jumper Cables for the Servo motor and USB Cable for the Arduino board.
Procedure:
1. Connect Arduino board via USB Cable to the computer.
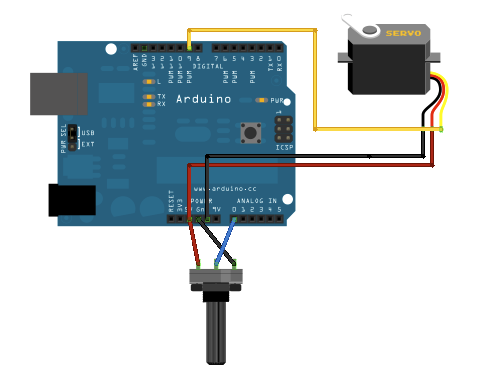
2. Connect the Servo motor to the Arduino Board.
3. Connect the Potentiometer to the Arduino Board.
4. Use a basic example such as the “Blink” program to make sure your Arduino board is in sync with the computer.
5. Upload the “Knob” example program from the Arduino programming library into the Arduino board.
6. Test the “Knob” program to learn about the functionality of the servo motor.
7. Finally, test the “Knob” program to make sure that you can control the servo motor with the Potentiometer.
8. Modify the program to understand the inner workings of how Arduino programs can directly affect the speed and rotation of servo motors. In addition, modify the program accordingly to understand how an potentiometer can directly control a servo motor.
Result: I was successfully able to connect the servo motor as well as the potentiometer to the Arduino board and test them. However, there were problems testing the servo motor because I did not initially correctly insert the yellow jumper cable into the ground pin (the same problem as last time), but with a little fiddling and by rereading the instructions it eventually worked.
Another unfortunate problem was that I could not get the jumper cable and power cable for the potentiometer to fit into the Arduino Board at the same time. The problem was eventually solved when I intertwined both of those wires and inserted them into the Arduino board. I also managed to modify the program to the degree to which as I turned the knob on the potentiometer down, the voltage and rev would also go down.
This project has been very productive because our project will involve using two servo motors that will activate via IR proximity sensors once an individual is at a certain distance. At that point, the servo motors will move the ears 180 degrees in both directions along with flashing LED lights and music playing to create a greater scare.

