Makerbot’s new Replicator is a printer for real things
http://www.nbcnews.com/technology/gadgetbox/makerbots-new-replicator-printer-real-things-1B6035906
http://www.symbrion.eu/tiki-index.php
The main focus of these projects is to investigate and develop novel principles of adaptation and evolution for symbiotic multi-robot organisms based on bio-inspired approaches and modern computing paradigms. Such robot organisms consist of super-large-scale swarms of robots, which can dock with each other and symbiotically share energy and computational resources within a single artificial-life-form. When it is advantageous to do so, these swarm robots can dynamically aggregate into one or many symbiotic organisms and collectively interact with the physical world via a variety of sensors and actuators. The bio-inspired evolutionary paradigms combined with robot embodiment and swarm-emergent phenomena, enable the organisms to autonomously manage their own hardware and software organization. In this way, artificial robotic organisms become self-configuring, self-healing, self-optimizing and self-protecting from both hardware and software perspectives. This leads not only to extremely adaptive, evolve-able and scalable robotic systems, but also enables robot organisms to reprogram themselves without human supervision and for new, previously unforeseen, functionality to emerge. In addition, different symbiotic organisms may co-evolve and cooperate with each other and with their environment.
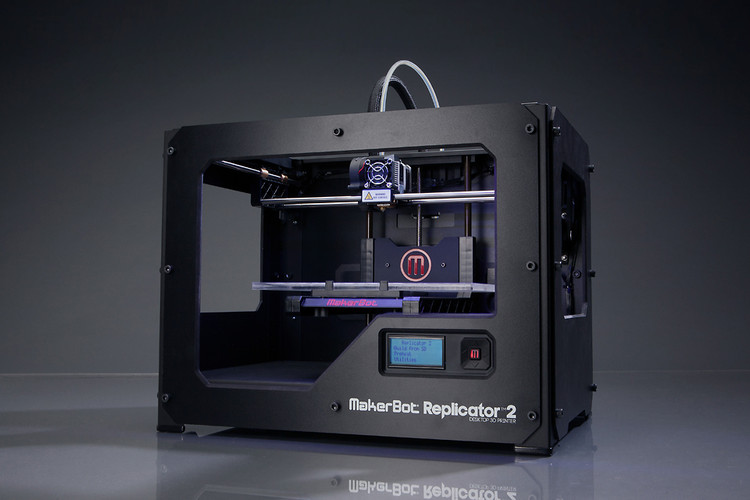
Makerbot devices perform “additive” manufacturing, which means they start with nothing and build from the ground up — like sculpting with clay. In the Replicator’s case, it heats up a special type of plastic and lays down thin filaments next to and on top of one another, eventually creating the form of the model. More expensive machines use “subtractive” manufacturing, where they start with a block of material and remove what they don’t need — like sculpting with stone.

