
While asking around to get some guidance on which sensor to write about and wondering aloud how best to find something that would enrich my 3D Animation class experience the fabulous Gabby suggested that I look into the XBOX Kinect because it was being tinkered around with in conjunction with Blender. Needless to say I was blown away. (http://www.blendernation.com/2011/12/22/bloop-the-blender-loop-station/)
So I took her advice and did a little research about the Kinect sensor and this is what I learned:
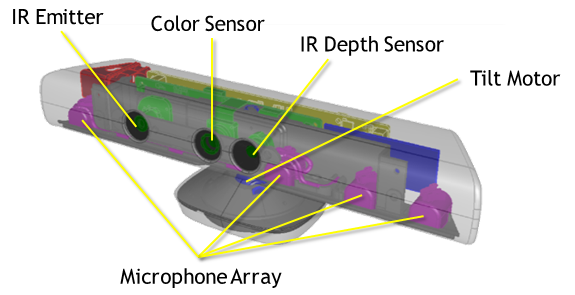
The Kinect sensors are housed in a flat black box that sits atop a small platform. There are four components. The first is a full color VGA camera. This sensor is used for facial recognition and body “skeleton” detection, which is used to map 48 points on the human body. (The software, which I will discuss in a later post, can use these mapped points to fill in body images when blocked by other players or furniture during a game!)
The second sensor is used to determine the dimensions of the room that the game is being played in. It is composed of something called a monochrome CMOS (complimentary metal oxide semiconductor) and an infrared projector with sensor. Because all three are used together most lighting conditions do not affect the way the game “sees” the room.
The third sensor is an array of four microphones that are specially designed to ignore ambient noise with 24-bit analog-to-digital converter (ADC) and Kinect-resident signal processing including acoustic echo cancellation and noise suppression. Sound can also be recorded.
And lastly is the Tilt Motor, which allows for the data being produced by a 3-axis accelerometer configured for a 2G range, where G is the acceleration due to gravity. It is possible to use the accelerometer to determine the current orientation of the Kinect.
http://msdn.microsoft.com/en-us/library/jj131033.aspx
http://electronics.howstuffworks.com/

