
Archive for April, 2014

This is an example of complex machinery that can produce 360 gourmet burgers in one hour!

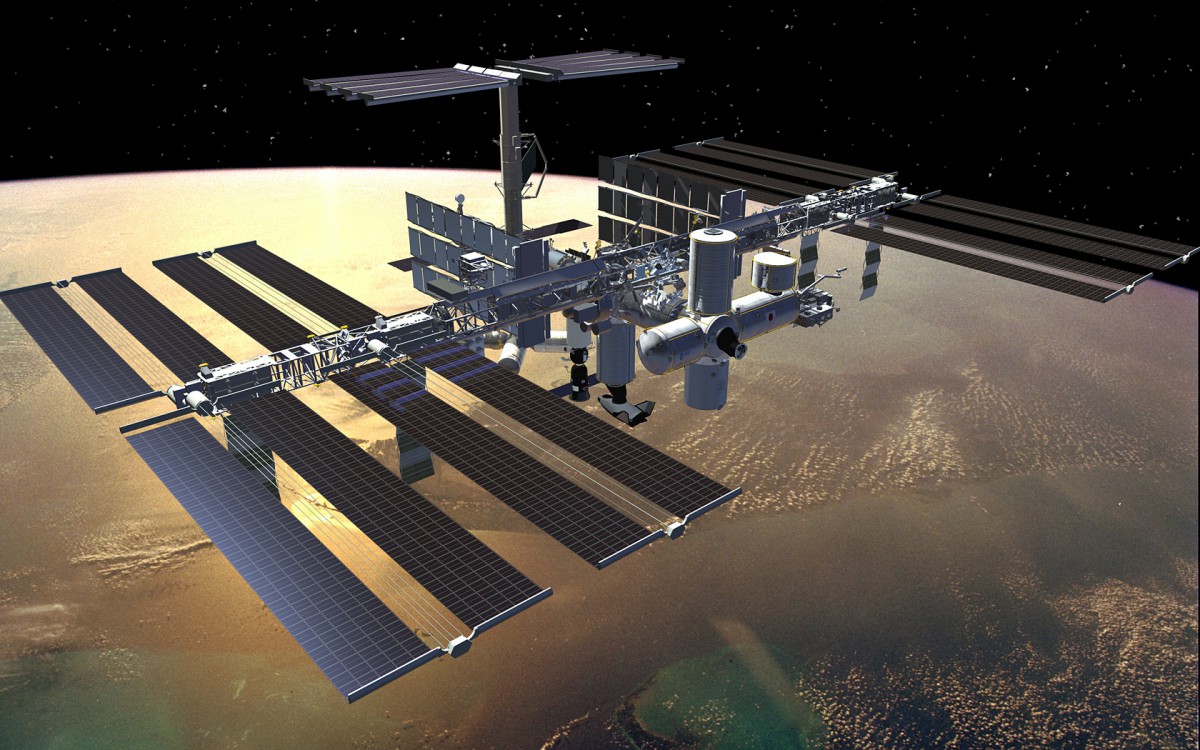
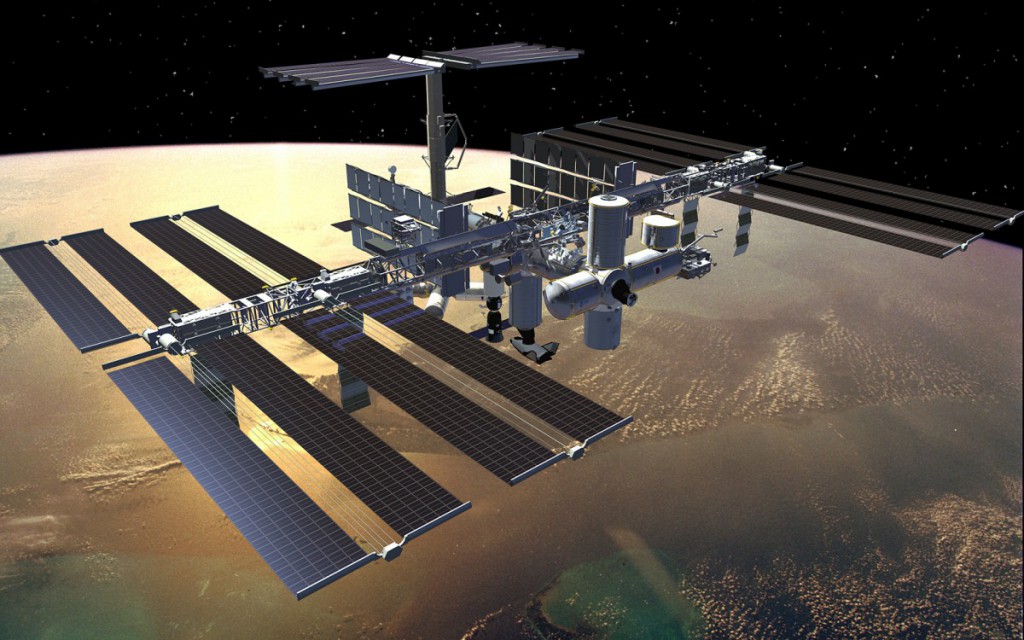 Today’s blog topic concerns our depiction of Space as an alien environment, cold and shallow. As the majority of Humans have never experienced the conditions of Space and probably never will, we can’t say we haven’t been there. The closest thing Humans have to living in Space is the International Space Station, which lives in low Earth orbit. The image of the ISS is intimidating and lifeless, but shows our accomplishments to build and occupy a lab in Space the size of a football field. The Space Station is a border-less collaboration of many nations that build and experiment for the sciences. It is the longest occupied human presence in Space, yet is peaceful and unaffected by human relations down on Earth. All the violence, all the bias motives, and all the politics don’t reach the ISS, everything remains quite and neutral up here. A person can literally get away from it all up in Space. This image is from one of NASA’s renderings that show their great accomplishments of sending and building the parts and people that make the ISS possible. The image shows the completed International Space Station in all its glory, which is available as wallpaper for desktops of Space enthusiasts. What’s appealing to me about this image is its calmness. With all the extravagant efforts and restless nights planning and executing every peace of the Space Station, it finally floats finished but not forgotten. Although the Space Station is a technology mecca itself, the work being performed inside it is also revolutionary. Unlike other visual media in my blog, this one displays something that already orbits Space, a reliable and proven machine which has made other discoveries possible. The image encourages me to keep working towards a field with potential to build something like the ISS and bring us closer to Space. What I hope others will find appealing about this image as i do is that Space has no ceiling, and neither should our ambitions to grasp it.
Today’s blog topic concerns our depiction of Space as an alien environment, cold and shallow. As the majority of Humans have never experienced the conditions of Space and probably never will, we can’t say we haven’t been there. The closest thing Humans have to living in Space is the International Space Station, which lives in low Earth orbit. The image of the ISS is intimidating and lifeless, but shows our accomplishments to build and occupy a lab in Space the size of a football field. The Space Station is a border-less collaboration of many nations that build and experiment for the sciences. It is the longest occupied human presence in Space, yet is peaceful and unaffected by human relations down on Earth. All the violence, all the bias motives, and all the politics don’t reach the ISS, everything remains quite and neutral up here. A person can literally get away from it all up in Space. This image is from one of NASA’s renderings that show their great accomplishments of sending and building the parts and people that make the ISS possible. The image shows the completed International Space Station in all its glory, which is available as wallpaper for desktops of Space enthusiasts. What’s appealing to me about this image is its calmness. With all the extravagant efforts and restless nights planning and executing every peace of the Space Station, it finally floats finished but not forgotten. Although the Space Station is a technology mecca itself, the work being performed inside it is also revolutionary. Unlike other visual media in my blog, this one displays something that already orbits Space, a reliable and proven machine which has made other discoveries possible. The image encourages me to keep working towards a field with potential to build something like the ISS and bring us closer to Space. What I hope others will find appealing about this image as i do is that Space has no ceiling, and neither should our ambitions to grasp it.
CHANG’E-5
C hang’e-5 will be an unmanned Chinese Lunar Exploration mission, which will be landing on the moon in 2017. The mission will be a sample return one, which will return 2 kilograms of moon soil and rock samples back to Earth. The probe will be launched into orbit by the Long March 5 rocket from Hainan Island. By the assistance of landing cameras, optical cameras, a gas analyzing instrument, other sampling instruments, and a drilling rig; the probe will softly land on Moon’s surface and dig to collect lunar soil 2 meters below the surface. Once the probe has what it needs, it will launch back into orbit and return to Earth in a return module. Chang’e-3 and Chang’e-4 probes will be sent on a separate mission in 2015 to not return, but set the stage for Chang’e-5 successful mission of returning moon sample in 2017. Link
hang’e-5 will be an unmanned Chinese Lunar Exploration mission, which will be landing on the moon in 2017. The mission will be a sample return one, which will return 2 kilograms of moon soil and rock samples back to Earth. The probe will be launched into orbit by the Long March 5 rocket from Hainan Island. By the assistance of landing cameras, optical cameras, a gas analyzing instrument, other sampling instruments, and a drilling rig; the probe will softly land on Moon’s surface and dig to collect lunar soil 2 meters below the surface. Once the probe has what it needs, it will launch back into orbit and return to Earth in a return module. Chang’e-3 and Chang’e-4 probes will be sent on a separate mission in 2015 to not return, but set the stage for Chang’e-5 successful mission of returning moon sample in 2017. Link
NASA’s MAVEN ORBITER
MAVEN, short for Mars Atmosphere and Volatile Evolution, is a Martian climate change probe capable of making unprecedented observations of the planet’s atmosphere. Launched on November 18th 2013, the orbiter will be inserted into areocentric elliptic orbit of Mars on September 22nd 2014. As part of the Mars Scout Program, the $671 Million MAVEN spacecraft will study Mars’ upper atmosphere to explore how the planet may have lost its atmosphere and water over time. Nine instruments will make up the probe, which was built in collaboration with UC Berkley, University of Colorado Boulder, and Goddard Space Flight Center. MAVEN’s instruments will measure characteristics of Mars’ atmospheric gases, atmosphere, ionosphere, and their relationship with solar winds. MAVEN will perform measurements while in orbit over a period of one Earth year, with five low altitude passes to sample the upper atmosphere. Link
MARS ORBITER MISSION (MOM)
India’s first orbiter to Mars, Mangalyaan, is closing in on its final destination through a 300 day mission traveling at 28 km/s. Launched in November of 2013, the 1337 kg spacecraft is carrying five instruments that will study a range of things including early signs of life on the red planet and its atmosphere. This particular mission is a demonstration mission to test the technologies required for design, planning, and operation of future Space missions. The orbiter is equipped with a Photometer, Composition Analyzer, Color Camera, Methane Sensor, and a Thermal Infrared camera. All the information procured from these instruments will be down-linked to Earth through Antennas during regular communication sessions. Hopes are to explore Mars’ surface, morphology, and mineralogy as well as to exercise the capabilities of deep space communication, navigation, and management. If all goes well, the Mangalyaan Orbiter will arrive into Mars’ orbit on September 24th of this year, 2 days after NASA’s Maven Orbiter; which will be the next topic of this series. Link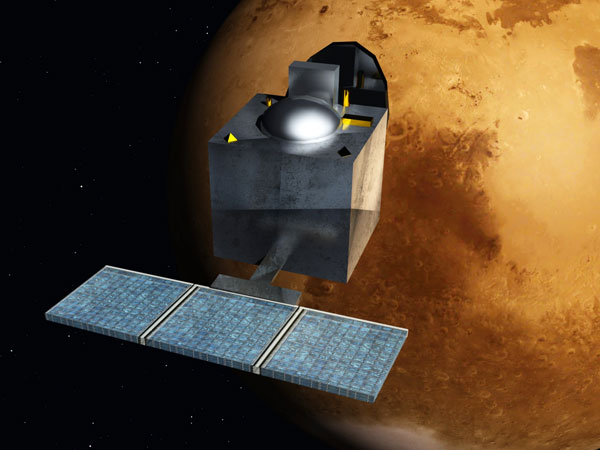
 I am announcing a four part series on Next Generation Space Exploring Robots, which I will be posting on the next few days. Development by different nations to have bragging rights on the next great exploration orbiters are underway. I will go in depth on projects through each post to discover and learn the process it takes for ideas to get off the drawing board and into Space. This will be very exciting, as it will showcase the participation of many countries in the single goal of figuring out our universe. To do so, investments are being made on orbiting labs which act as mediators to science and research down here on Earth. Please join me over the next few posts as I write about new orbiting equipment and different launch systems that will diversify the space exploration sector.
I am announcing a four part series on Next Generation Space Exploring Robots, which I will be posting on the next few days. Development by different nations to have bragging rights on the next great exploration orbiters are underway. I will go in depth on projects through each post to discover and learn the process it takes for ideas to get off the drawing board and into Space. This will be very exciting, as it will showcase the participation of many countries in the single goal of figuring out our universe. To do so, investments are being made on orbiting labs which act as mediators to science and research down here on Earth. Please join me over the next few posts as I write about new orbiting equipment and different launch systems that will diversify the space exploration sector.
The Korean Institute of Ocean Science and Technology (KIOST) along with five universities have developed a car size six-legged robot that walks on the ocean floor. The robot is called the Crabster CR200, which borrows its design from crabs and lobsters. The robot was submerged earlier this month to scour the ocean for scientific exploration, commercial surveying, and treasure hunting. Testing has been performed at a max depth of 656 feet on the Crabster, which has ten cameras, a sonar scanner, locating transponder, Doppler, and an acoustic camera. Of its six legs, the two front ones have extendable grippers for maneuverability and reach. Engineers can control CR200 from a remote control station, which allows the robot to remain on the sea floor for multiple days yet keeps its operators dry and safe. in the future, once the Crabster is tweaked and fully tested, will be sent to investigate sunken ships. Link
credit: http://www.chrisbrogan.com/100-blog-topics-i-hope-you-write/

